Le Pixhawk 2 à été conçu par la communauté Pixhawk open hardware en collaboration avec 3DRobotics et fut d’abord dévoilé sur le drone 3DR Solo. Bien qu’initialement prévu pour être produit en version « standalone » (seule) par 3DRobotics, il ne fut disponible que 2 ans plus tard grâce aux efforts d’un certain Hex66 et de ProfiCNC.
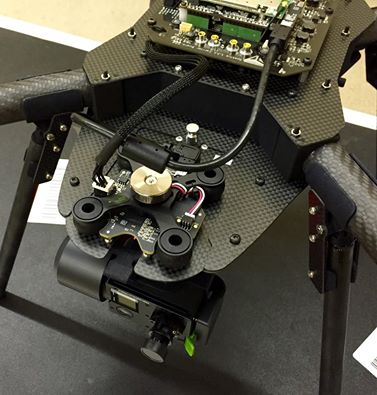
De multiples configurations supportées : VTOL, avion, multi-rotor, helicopter traditionnel, voiture, bateau, sous-marin et robotique en général.
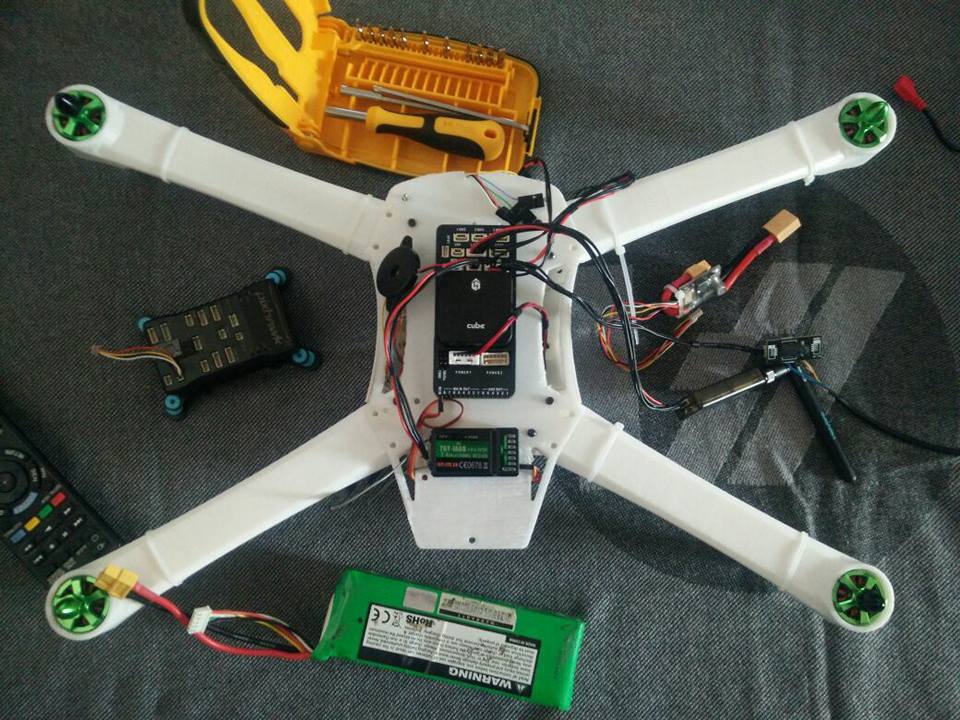
La modularité du Pixhawk 2 lui permet d’adopter différente formes et de s’adapter à de multiples plate-formes.
Un gros avantage du Pixhawk 2 est so n connecteur DF17 unique sur la base qui permet de tester et de calibrer en usine.
Il n’est pas un produit de 3DRobotics, ce projet à été poussé et conçu par la communauté et fait pour la communauté.

Voici les principaux avantages du Pixhawk 2 :
- Conception modulaire, large choix de carte porteuses (carrier board)
- 100% prêt pour accueillir un GPS RTK, le Multi GPS est standard sur le Pixhawk
- Triple redondance des centrales inertielles (IMU)
- Centrales inertielles isolées, amorties avec contrôle de la température
- Port intégré pour mini ordinateur Intel Edison. Une solution simple pour ajouter plus de puissance de calcul avec un seul connecteur.
- Systèmes de centrales inertielles (IMU) et système de gestion de vol (FMU) séparés afin de réduire les interférences avec les capteurs.
- Mousse pour réduire les vibrations haute fréquence et le bruit mesuré par les capteurs.
- Centrales inertielles à température contrôlée. Une résistance générant de la chaleur est intégrée afin de contrôler la température des IMUs. Fonctionne sans problème en dessous de 0°.
- Triple redondance des centrales inertielles (3 accéléromètres, 3 gyroscopes, 3 magnétomètres, 2 baromètres)
- Support des voilures fixes, multi-rotor et VTOL
- Environnement de développement ouvert
- Conception cubique modulable
- Centrales inertielles amorties
- Triple redondance des centrales inertielles
- Support des GPS centimétriques
- Support du multi GPS
- Possibilité de voler à des températures extrême
- Le Pixhawk 2.1 a énormément évolué par rapport aux versions précédentes, sous tout les aspects.
Contrôleur de vol modulaire
Conception cubique modulaire pour la simplicité. Toutes les entrées sorties se trouve sur un seul connecteur DF17. Il est possble d’utiliser différentes « carrier boards » pour des applications spécifiques. Ou concevez aisément vous même votre « carrier board ».
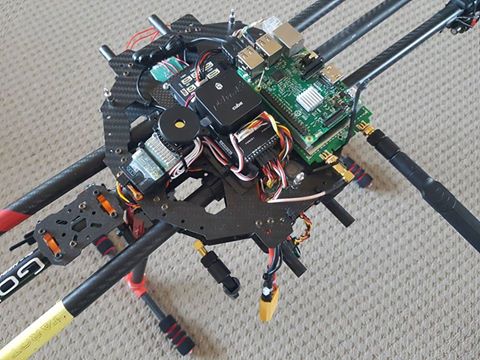
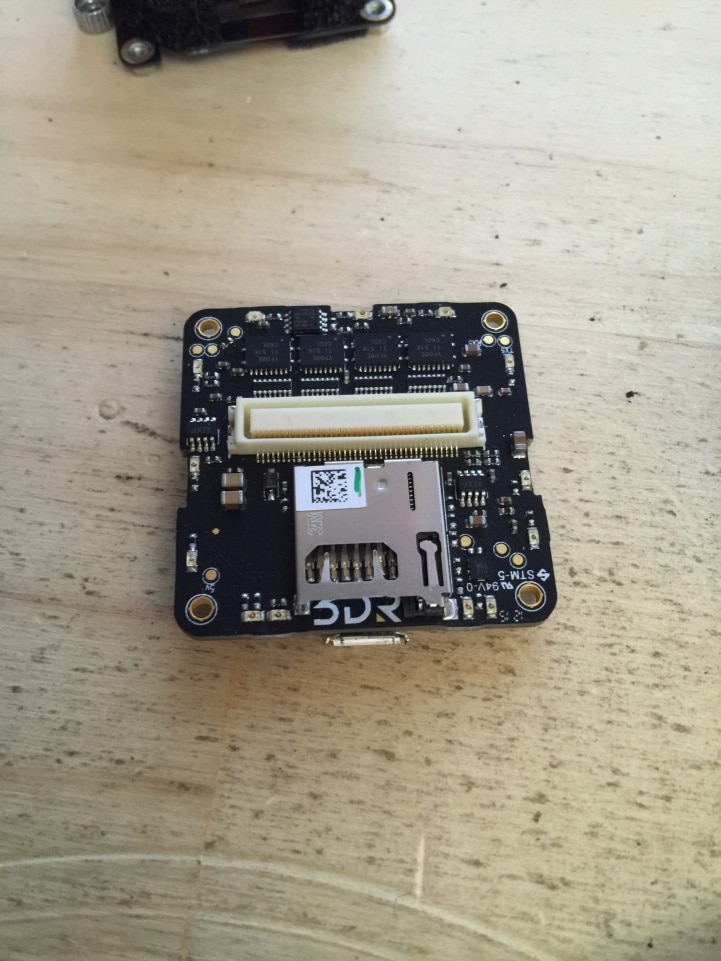
Carrier board
La « carrier board » est équipé d’un port Intel©Edison qui se connecte comme un « companion computer ».
La puissance de calcul élevée et un environnement de développement « développeur-friendly » augmentent le potentiel pour plus de fonctionnalités.
Spécifications :
Points clefs :
- Processeur 168 MHz / 252 MIPS Cortex-M4F
- 14 sorties servo PWM (8 avec failsafe et commande manuelle, 6 auxiliaires, compatible haute puissance)
- Connectivité abondante pour périphériques additionnels (UART, I2C, CAN)
- Système de soutien (backup) intégré intégré pour récupération en vol et reprise manuelle avec processeur dédié
- Alimentation séparée (principalement pour une utilisation avec les voilures fixes).
- Le système de secours intègre le mixage des canaux afin de procurer transition aisée. (pour voilures fixes)
- Entrées d’alimentation redondantes avec basculement (failover) automatique.
- Interrupteur de sécurité (safety switch) externe.
- LED multicolor
- Buzzer piezo haute puissance multi-ton
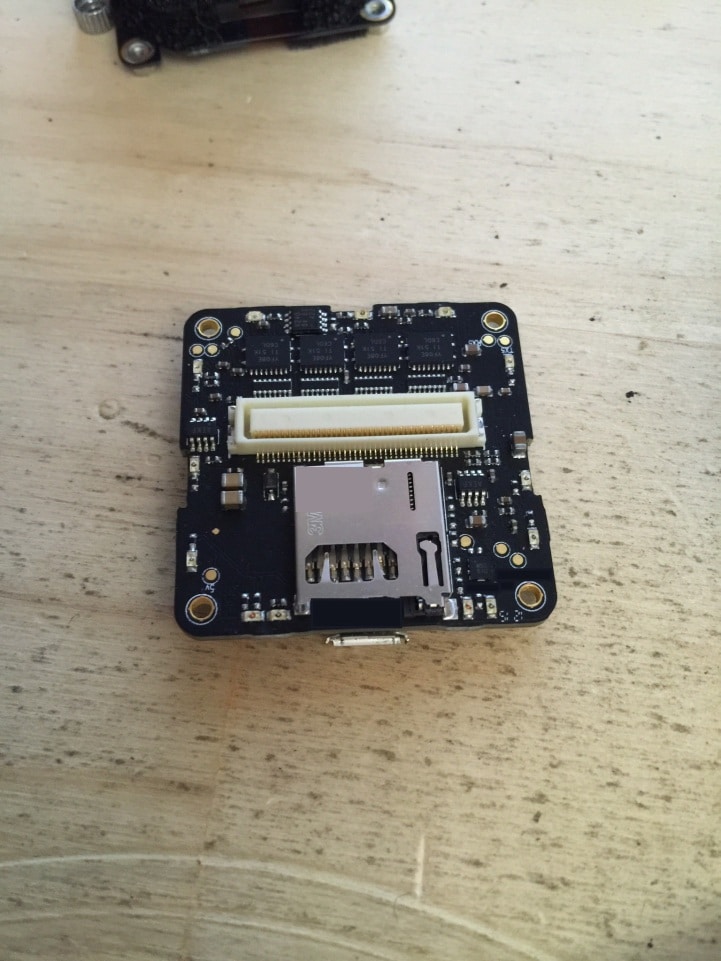
- Carte microSD pour
- Carte microSD for enregistrement des logs à haut débit sur de longue périodes
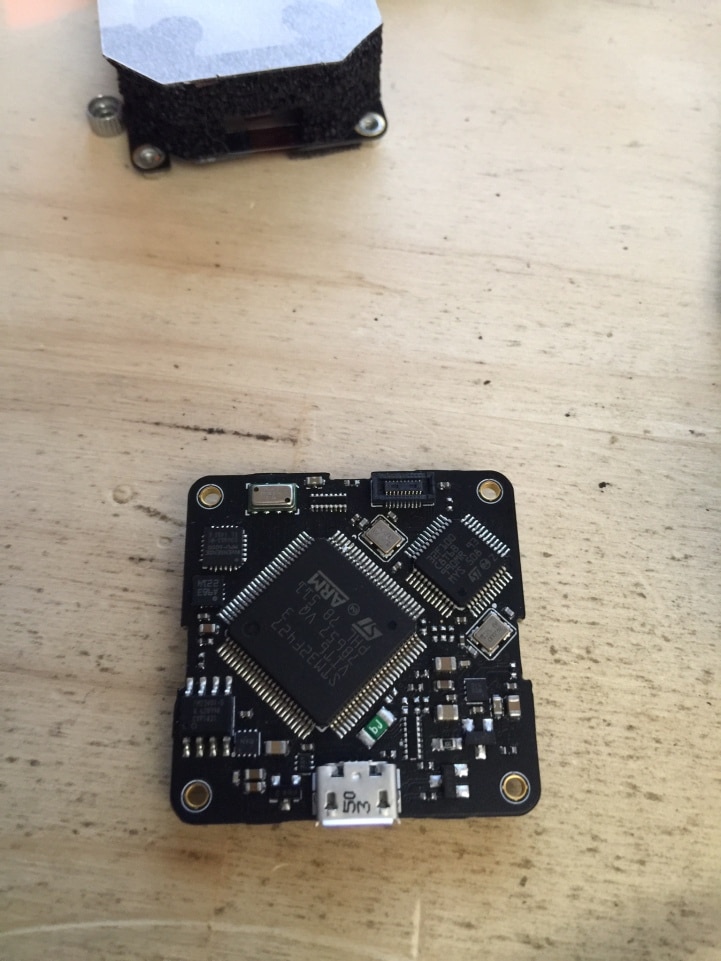
Processeur :
- STM32F427 Cortex M4 32bit
- 168 MHz
- RAM 256 KB
- 2 MB Flash (complètement accessible)
- 32 bit STM32F103 co-processeur failsafe
Capteurs :
- TBA
Interfaces :
- 5x UART (ports série), dont un haute puissance et 2x avec contrôle de flux matériel.
- 2x CAN (dont 1 avec transcepteur interne 3.3V et un sur connecteur d’extension externe.
- Entre compatible Spektrum DSM / DSM2 / DSM-X® Satellite
- Entrée et sortie compatible Futaba S.BUS®
- Entrée signal PPM sum
- Entrée RSSI (PWM ou voltage)
- I2C
- SPI
- Entrées 3.3 et 6.6V ADC
- Internal microUSB port and external microUSB port extension
- Port microUSB interne et extension de port microUSB
- Système d’alimentation et protection
- Diode idéale avec failover automatique
- Rail de servos haute tension (max 10V) et haut amperage (10A+)
- Tout les périphériques sont protégés contre les surintensités, toutes entrées protégées contre les décharges électrostatiques
Schémas :
- Pas encore mis à jour à la version release (nécessitera un pull request de ProfiCNC) : https://github.com/PX4/Hardware/tree/master/FMUv3_REV_D
pcb-3d-print-from-below pcb-3d-print-from-above pcb-3d-print-from-above-1


Bon à savoir :
Il est important d’utiliser le dernier firmware (APM:Plane, APM:Copter, etc)
Et d’utiliser la dernière version de Mission Planner.
Quand vous connectez le Pixhawk 2 à Mission Planner pour la première fois, il est important de mettre le paramètre « AHRS_ORIENTATION » à « 0 ». Cela permet de corriger l’horizon.
La redondance des capteurs apporte uniquement de la redondance et n’améliorera pas la précision des mesures, les capteurs étant les mêmes.
Si vous connectez des périphériques en USB, il faudra les alimenter séparément. C’est une protection pas un erreur de conception.
Le sortie SBUS d’un récepteur se branche sur l’entrée RC IN
Il est possible de connecter un Intel Edison mais ce n’est pas indispensable.

L’Edison n’a rien à voir avec le RTK
Pour le RTK il suffit de brancher un GPS Ublox M8P, les données de correction sont transféré en télémétrie par Mavlink. C’est apparement prêt à l’emploi (plug and play).
Avec sa « carrier board » pèse 74g

Il est possible d’utiliser un module d’alimentation du 1 sur le 2 mais il faut modifier le câble.
Tous les Pixhawk 2 vendus contribue à financer l’équipe de développeurs.
Le Pixhawk peut être fabriqué par plusieurs entreprises, chacune d’entre elles devra répondre à des critères de test et de contrôle qualité.
De grandes choses sont prévues prochainement concernant le retour vidéo et l’évitement d’obstacles.
2 option pour le GPS : le classique Ublox M8N et le M8P pour le RTK.
Le nouveau GPS est un peu plus large que le LEA6H de chez 3DR, il fait 6cm de diamètre.
Le Pixhawk 2 est en développement et vol depuis 2014.
Modèle 3D sur Autodesk Myhub
Accessoires :
- Intel Edison
- Raspberry 3
- Nvidia Jetson TX1
- Lidar lightWare SF11/C
- Modules d’alimentation à effet hall avec câble compatible Pixhawk 2
- GPS + Compas
Où acheter le Pixhawk 2 :
- Etats-Unis : https://northox.myshopify.com/products/pixhawk-2
- Etats-Unis : http://www.jestersdrones.com/
- France : http://www.skeyetech-shop.fr/index.php/autopilote/kit-pixhawk-2-detail
- Turquie : http://www.karbondrone.com/
- Italie : http://www.allriders.lt/product-page/9c84bdb0-ac40-fa68-9139-fd71cba19de5
- Belgique : https://drones.altigator.com/pixhawk-2-p-42392.html
Sites qui parlent du Pixhawk
- What is Pixhawk 2 (diydrones.com)
- Pixhawk vs Pixhawk 2 (diydrones.com)
- Intel Edison as a Companion Computer (ardupilot.org)
- Pixhawk 2 Getting Started (ardupilot.org)
- The Pixhawk 2 is coming soon as a standalone flight controller (3DRPilots.com)
- Pixhawk 2 (un)official discussion thread (RCGroups.com)
- Pixhawk 2 !? (RCGroups.com)
- Officiel : Site de l’un des principaux concepteurs et fabricants du Pixhawk 2.1
- Officiel : Page du Pixhawk 2 sur pixhawk.org
- Officiel : Groupe Facebook fermé (sur invitation) Pixhawk 2 (Facebook.com)
- Officiel : Pixhawk2.com
- Officiel : @pixhawk2 (twitter.com)
- Officiel : Instagram
- Officiel : Groupe Pixhawk2 (diydrones.com)
- Groupe Google
Galerie d’images