BRIDGE : Une interface de pilotage centrée sur l’utilisateur
L’interface logicielle développée par DEEP TREKKER baptisée BRIDGE optimise les fonctionnalités de pilotage. Cette technologie permet le traitement en temps réel des données reçues au travers d’un processus connu sous le nom de « fusion des capteurs » qui combine les données de profondeur, température, boussole, roulis, angle d’inclinaison (PITCH), angle caméra (TILT)…
L’intégralité des données recueillies est disponible directement depuis l’écran du contrôleur.
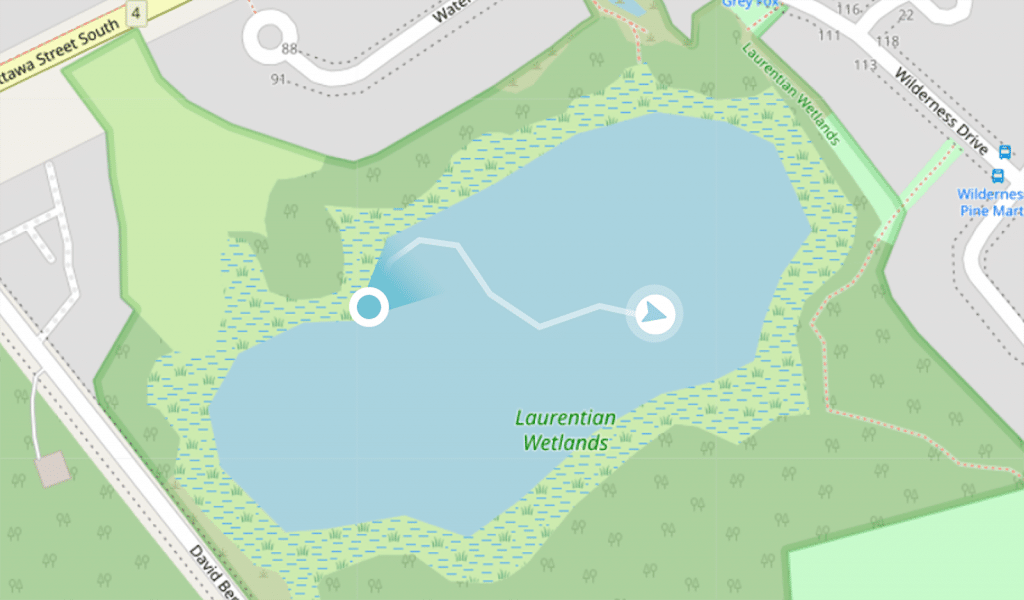
Les fonctions « auto-profondeur » et « auto-cap » sont particulièrement pour stabiliser le ROV en profondeur et conserver un cap « cible ». La technologie BRIDGE va encore plus loin en affichant à l’écran les images provenant des sonars et du système de positionnement sous-marin.