Le Zenmuse L2 atteint un niveau de protection IP54 conformément à la norme IEC60529 dans des conditions de laboratoire contrôlées. Pour garantir les niveaux de protection les plus élevés :
– Avant l’installation, assurez-vous que l’interface et la surface de la rotule sont sèches ;
– Avant utilisation, assurez-vous que la rotule est fermement installée sur le drone et que le capuchon de protection de la carte SD est propre, exempt de tout objet étranger et fermé ;
– Avant d’ouvrir le capuchon de protection de la carte SD, essuyez la surface du drone.
Le niveau de protection diminuera avec le temps en raison de l’utilisation et de l’usure normales de l’appareil.
Le Zenmuse L2 est compatible avec le Matrice 350 RTK et le Matrice 300 RTK et supporte uniquement la télécommande DJI RC Plus. Avant de l’utiliser, veuillez mettre à jour le firmware de l’appareil et de la télécommande avec la dernière version. Pour garantir la précision de la cartographie, assurez-vous que la L2 est montée sur un connecteur de gimbal simple vers le bas avec le câble connecté au port USB-C de droite (lorsque vous faites face au drone).
Balayage répétitif : Horizontal 70°, Vertical 3°
Balayage non répétitif : Horizontal 70°, Vertical 75°.
Portée de détection :
250 m à 10 % de réflectivité, 100 klx
450 m à 50 % de réflectivité, 0 klx
L’altitude de fonctionnement recommandée est de 30 à 150 m.
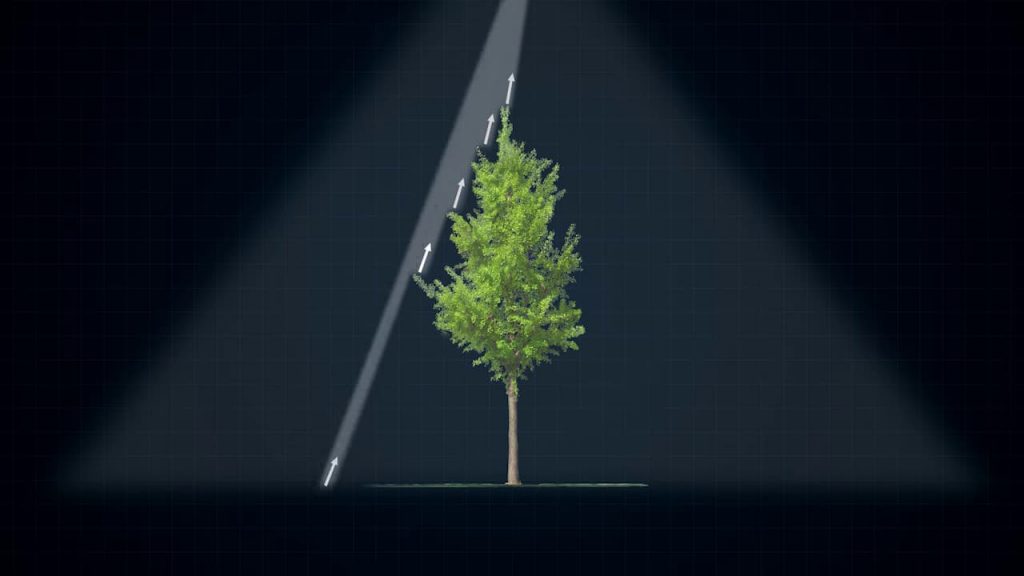
Le Zenmuse L2 prend en charge cinq types de retours : Retour simple (écho le plus fort), retours doubles, retours triples, retours quadruples et retours penta.
Retour simple : max. 240 000 pts/s
Retours multiples : max. 1 200 000 pts/s
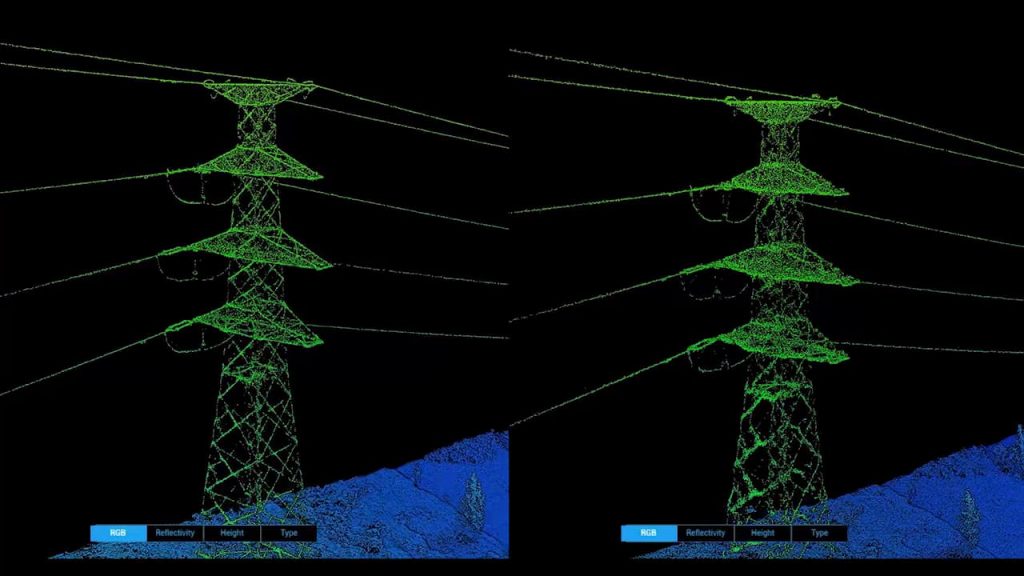
Le Zenmuse L2 dispose de deux modes de balayage : le mode de balayage non répétitif et le mode de balayage répétitif.
En mode de balayage répétitif, le LiDAR peut réaliser un balayage plus uniforme et plus précis, répondant ainsi aux exigences d’une cartographie de haute précision.
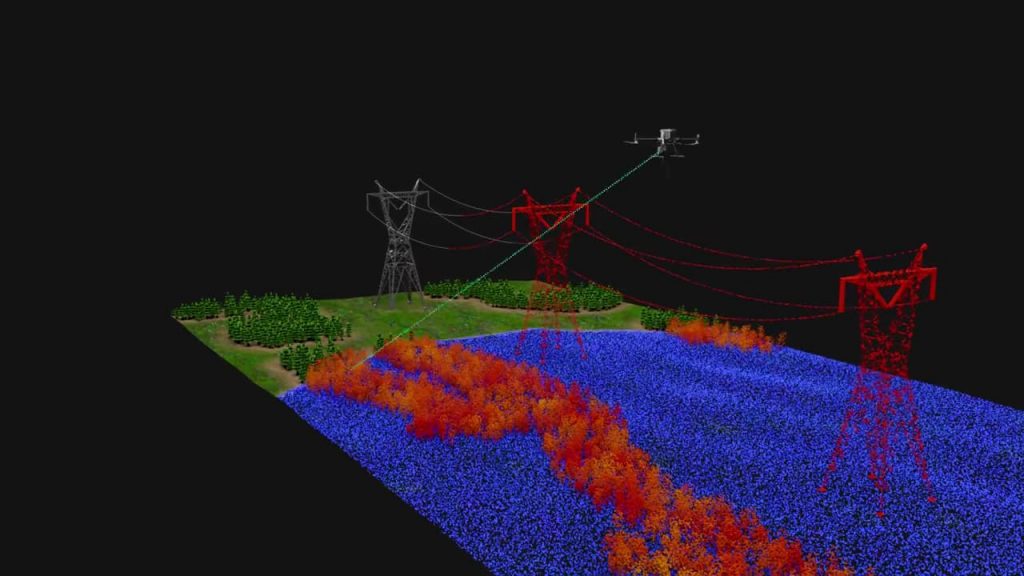
En mode de balayage non répétitif, il offre une plus grande pénétration et permet de recueillir davantage d’informations structurelles, ce qui le rend adapté à l’inspection des lignes électriques, à l’arpentage forestier et à d’autres scénarios.
Précision en lacet : Temps réel : 0,2°, post-traitement : 0.05°
Précision du tangage et du roulis : Temps réel : 0,05°, post-traitement : 0,025°.
Précision du positionnement horizontal : 1 cm + 1 ppm (RTK FIX)
Précision du positionnement vertical : 1,5 cm+1 ppm (RTK FIX)
Les précisions de lacet et de tangage/roulis ont été mesurées dans les conditions suivantes dans un environnement de laboratoire DJI : Zenmuse L2 monté sur un Matrice 350 RTK et mis sous tension. Utilisation de l’Area Route de DJI Pilot 2 pour planifier la route de vol (avec Calibrate IMU activé). RTK en état FIX. L’altitude relative a été réglée à 150 m, la vitesse de vol à 15 m/s, le pitch du gimbal à -90°, et chaque segment droit de la route de vol était inférieur à 1500 m.
Lors de la collecte de données de nuages de points, la caméra RVB peut fournir des informations de couleur en temps réel pour les données, et les photos prises peuvent être utilisées pour reconstruire des modèles RVB 2D. Lorsqu’il n’est pas nécessaire de collecter des données de nuages de points, la caméra RVB peut prendre des photos et des vidéos, et collecter des images pour reconstruire des modèles RVB 2D ou 3D.
Précision horizontale : 5 cm
Précision verticale : 4 cm
Mesuré dans les conditions suivantes dans un environnement de laboratoire DJI : Zenmuse L2 monté sur un Matrice 350 RTK et mis sous tension. Utilisation de la route de zone de DJI Pilot 2 pour planifier la route de vol (avec Calibrate IMU activé). Utilisation du balayage répétitif avec le RTK dans l’état FIX. L’altitude relative a été réglée à 150 m, la vitesse de vol à 15 m/s, le tangage du gimbal à -90°, et chaque segment rectiligne de la route de vol était inférieur à 1500 m. Le champ contenait des objets avec des caractéristiques angulaires évidentes, et utilisait des points de contrôle de sol dur exposé qui étaient conformes au modèle de réflexion diffuse. DJI Terra a été utilisé pour le post-traitement avec l’option Optimiser la précision du nuage de points. Dans les mêmes conditions, si l’option Optimiser la précision du nuage de points n’est pas activée, la précision verticale est de 4 cm et la précision horizontale de 8 cm.
La caméra RVB utilise un CMOS 4/3 et la taille des pixels est de 3,3 × 3,3 μm.
Les performances du LiDAR ont été améliorées pour atteindre environ 1/5 de la taille du spot de L1 lorsque l’objet ou la zone se trouve à 100 m du LiDAR. La capacité de pénétration du LiDAR a été considérablement améliorée, de même que sa portée de détection et sa précision. La taille des pixels de la caméra RVB a augmenté de 89 % par rapport aux 2,4 × 2,4μm de L1. La précision de l’IMU a été améliorée à 0,05° (en temps réel) et à 0,025° (post-traitement). Le LiDAR prend en charge le télémètre laser (RNG).