Performance et précision optique
La Zenmuse L3 redéfinit la performance dans un format compact. Elle combine un LiDAR longue portée (1535nm) avec un double capteur de cartographie RVB de 100MP, un système POS de haute précision et une nacelle à trois axes. Cette intégration offre des capacités de collecte de données sans précédent pour un appareil de cette taille.
LiDAR longue portée et large couverture
La Zenmuse L3 est conçue pour l’efficacité sur de vastes étendues :
- Portée de détection maximale : Le LiDAR atteint une portée de 950 mètres (testé à 100 kHz, 100 klx et 10% de réflectivité).
- Taux d’impulsion ajustable : Vous pouvez régler la puissance de sortie du LiDAR pour l’adapter de manière optimale à différents scénarios opérationnels.
- Efficacité accrue : En volant plus haut, la L3 augmente considérablement la couverture de terrain en un seul vol, ce qui optimise l’efficacité globale de la cartographie.


Faisceau concentré, haute énergie
La Zenmuse L3 produit un faisceau laser d’une grande finesse, avec une divergence de seulement 0,25 mrad (1/e²).
- Taille de spot réduite : À une portée équivalente, la taille du spot est environ cinq fois plus petite que celle de la Zenmuse L2.
- Détection d’objets fins : Cette précision permet de détecter des cibles plus petites, comme les lignes électriques et les branches.
- Capacité de pénétration supérieure : La densité d’énergie plus élevée du faisceau lui confère une capacité de pénétration accrue, ce qui augmente significativement la densité de points au sol sous la végétation.
- Reconstruction de haute précision : Permet une reconstruction très précise des structures et des terrains complexes, même sous couvert végétal
Fréquence d'impulsion élevée et retours multiples
La Zenmuse L3 offre une reconstruction spatiale d’une grande précision grâce à ses performances LiDAR avancées.
- Haute fréquence d’impulsion : Le capteur peut émettre jusqu’à 2 millions d’impulsions laser par seconde.
- Retours multiples : Il prend en charge jusqu’à 16 retours par impulsion, ce qui est crucial pour pénétrer la végétation dense.
- Résultats ajustables : La densité du nuage de points et la capacité de pénétration peuvent être ajustées pour s’adapter à une large gamme de besoins, de la cartographie de haute précision aux environnements les plus complexes.

Modes de balayage adaptatifs
La Zenmuse L3 prend en charge trois modes de balayage (Linéaire, en Étoile et Non Répétitif) pour s’adapter à différents scénarios opérationnels :
- Mode Linéaire : Assure une distribution plus cohérente du nuage de points, ce qui est idéal pour la cartographie de terrain de haute précision.
- Mode en Étoile : Offre le meilleur équilibre entre précision, angles de balayage multiples et capacité de pénétration. Il est parfaitement adapté aux missions en forêt ou en environnements urbains denses.
- Mode Non Répétitif : Fournit de multiples angles de balayage et une couverture plus large. Ce mode est optimisé pour l’inspection de lignes électriques et d’autres levés de structures complexes.
Système de double caméra de cartographie RVB 100MP
La Zenmuse L3 est équipée de deux capteurs RVB CMOS 4/3 de 100MP, chacun doté d’un obturateur mécanique, pour une amélioration significative de la précision et de l’efficacité.
- Performance en basse lumière : Le mode de regroupement de pixels (pixel binning) permet d’atteindre une résolution effective de 25MP. En augmentant la taille des pixels, ce mode offre une reproduction supérieure des couleurs, même dans des conditions d’éclairage difficiles.
- Large couverture (FOV 107°) : Les deux caméras offrent un champ de vision horizontal combiné allant jusqu’à 107°, ce qui permet à chaque capture de couvrir une zone plus large.
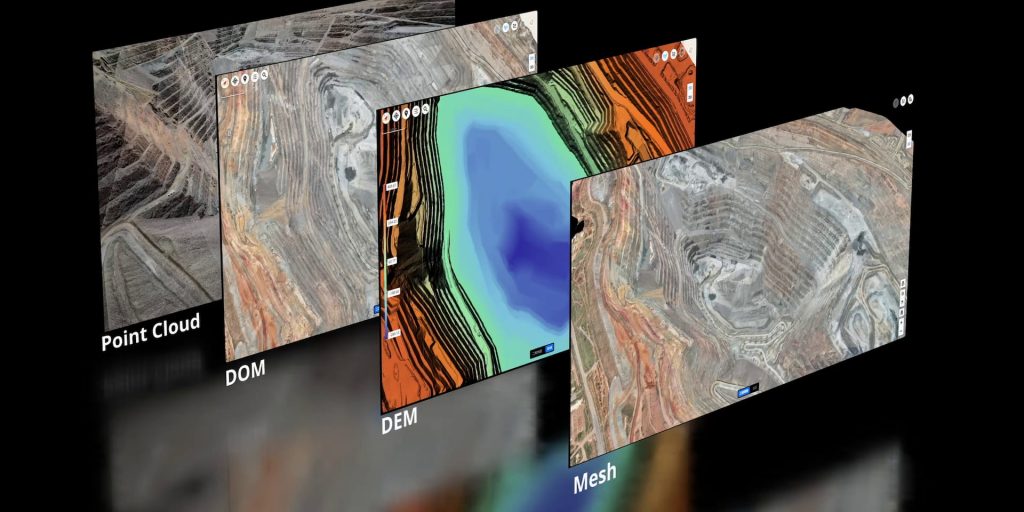
- Efficacité en un seul vol : Grâce à cette large couverture, vous pouvez acquérir les données nécessaires à la fois pour les orthophotos numériques (DOM) et les modèles numériques d’élévation (MNE) en un seul passage, même avec un faible taux de recouvrement latéral LiDAR (20%). L’efficacité opérationnelle est ainsi grandement améliorée.