
Le positionnement sous-marin joue un rôle clé dans les opérations sous-marines, permettant un suivi précis de la localisation pour des tâches allant de l’étude détaillée à la maintenance des actifs. Les défis uniques de la navigation sous-marine exigent des solutions spécialisées, et les véhicules télécommandés (ROV) sont devenus un outil essentiel pour répondre à ces besoins.
Cet article explore les méthodes fondamentales de la navigation sous-marine et comment les ROV Deep Trekker, équipés de technologies avancées telles que la navigation à l’estime, le GPS ROV, l’USBL et les systèmes IMU, surmontent les défis traditionnels de la navigation sous-marine.
La localisation sous-marine fait référence aux techniques utilisées pour déterminer la position précise d’un objet, d’un véhicule ou d’un bien, sous la surface de l’eau au cours d’opérations sous-marines.

Contrairement aux environnements terrestres où le GPS fournit des données de localisation fiables, la navigation sous-marine nécessite d’autres méthodes en raison de l’atténuation du signal dans l’eau. Comme les signaux GPS traditionnels ne peuvent pas pénétrer l’eau, la localisation sous-marine repose sur des méthodes alternatives telles que les systèmes de positionnement acoustiques, la navigation inertielle et la navigation à l’estime, chacune étant adaptée à des besoins opérationnels et à des environnements différents.
Les principales méthodes de positionnement sous-marin sont les suivantes :
Le positionnement acoustique : Les systèmes tels que l’USBL utilisent des signaux acoustiques pour trianguler la position d’un robot sous-marin par rapport aux émetteurs-récepteurs de surface ou aux stations fixes du fond marin. Les systèmes DVL mesurent la vitesse du véhicule par rapport au fond marin et intègrent les données pour fournir des informations de localisation. Ils sont souvent utilisés en tandem avec d’autres méthodes pour améliorer la précision. Les méthodes acoustiques sont largement utilisées dans les eaux profondes en raison de leur précision sur de grandes distances.
Navigation à l’estime (dead reckoning) : Technique qui permet d’estimer la position actuelle sur la base de la position de départ connue, ainsi que de la vitesse et de la direction du mouvement. Bien que cette méthode ne soit pas absolue, elle permet une mise à jour continue de la position, en particulier lorsque les autres technologies sont limitées.
Navigation inertielle : Les systèmes tels que les unités de mesure inertielle (IMU) suivent le mouvement et l’orientation à l’aide d’accéléromètres et de gyroscopes. Combinés à la navigation à l’estime, ils fournissent des estimations de position continues en l’absence de signaux externes.
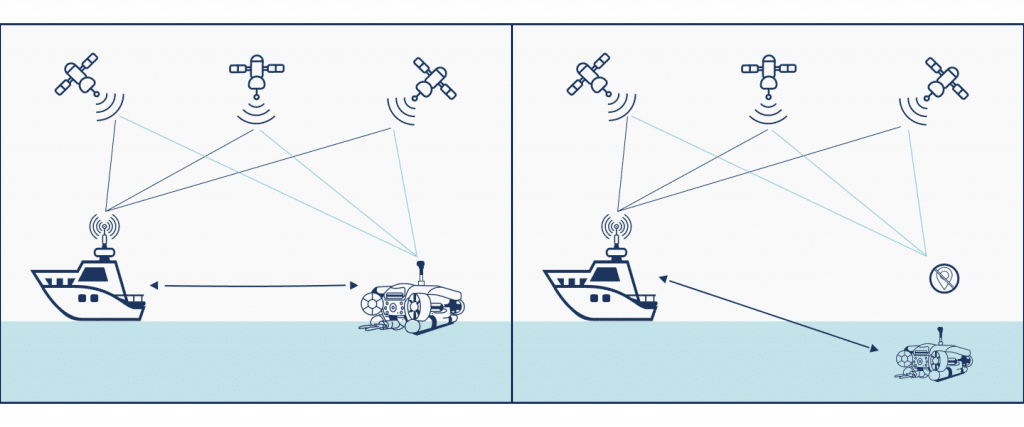
GPS de surface : Bien qu’inefficace sous l’eau, le GPS peut être utilisé pour suivre les navires de surface ou les bouées flottantes. Ces données peuvent ensuite être intégrées à d’autres méthodes de navigation afin d’améliorer la précision du positionnement lorsque le ROV fait surface.
Chaque méthode a ses points forts et ses limites et, dans de nombreux cas, une combinaison de technologies est utilisée pour garantir un positionnement cohérent et précis pendant les opérations sous-marines. Les ROV de Deep Trekker utilisent un mélange de ces technologies, ce qui permet un contrôle précis et une navigation fiable, même dans des environnements sous-marins complexes.
Dans les opérations sous-marines, le positionnement précis a toujours été un défi majeur, en particulier pour les études et les inspections. Historiquement, la navigation sous-marine s’appuyait sur des boussoles et sur la gestion manuelle des câbles, offrant une précision limitée.
Au fil du temps, des méthodes acoustiques telles que les systèmes à longue ligne de base (LBL), à courte ligne de base (SBL) et à ultra-courte ligne de base (USBL) sont apparues, tirant parti de l’acoustique sous-marine pour localiser avec précision les ROV. Ces méthodes, ainsi que le DVL (Doppler Velocity Log), sont devenues des normes professionnelles pour la navigation sous-marine. Aujourd’hui, les progrès des centrales inertielles (IMU), telles que les MEMS (microsystèmes électromécaniques) et les gyroscopes à fibre optique (FOG), permettent de suivre les ROV en temps réel, ce qui améliore considérablement la collecte de données.
En combinant les systèmes de positionnement acoustique et le GPS des ROV, les robots sous-marins Deep Trekker offrent une précision incroyable. L’intégration de diverses technologies, de la navigation à l’estime à l’USBL, permet à ces ROV d’opérer efficacement dans différents secteurs, notamment la recherche marine, la maintenance des actifs et les inspections en mer.
Les système de positionnement par satellites (GNSS/GPS) ne peuvent pas fonctionner sous la surface de l’eau en raison de l’atténuation rapide du signal dans l’eau. Alors que les ondes radio se propagent efficacement dans l’air, elles sont absorbées par les molécules d’eau, ce qui rend le GPS inefficace pour les opérations sous-marines. Par conséquent, les opérateurs de ROV ont dû s’appuyer sur des systèmes de positionnement acoustiques et sur la navigation inertielle pour fournir des données de localisation précises sous l’eau.
Les ROV Deep Trekker intègrent une gamme de technologies de navigation de pointe pour répondre aux exigences uniques des opérations sous-marines. De la navigation à l’estime au GPS ROV, chaque système joue un rôle essentiel en permettant aux ROV de déterminer avec précision leur position dans des environnements dépourvus de points de référence directs.
Le GPS ROV de Deep Trekker offre un nouveau niveau de précision et de contrôle dans le suivi de la position en surface pour les opérations sous-marines. Conçu pour s’intégrer parfaitement aux ROV REVOLUTION et PIVOT, le module GPS se monte facilement sur le ROV et fournit des mises à jour de position en temps réel lorsque le ROV fait surface.
Ce système se recalibre automatiquement en fonction des données GPS, ce qui permet un suivi stable et précis pendant les missions. En travaillant en tandem avec la technologie Dead Reckoning, le GPS ROV améliore la précision opérationnelle, atteignant jusqu’à 2,5 cm de précision avec la compatibilité RTK/SBAS, avec la prise en charge des constellations GPS, GLONASS, BeiDou et Galileo.
Alors que le GPS traditionnel est inefficace sous l’eau, le système GPS ROV de Deep Trekker utilise le positionnement en surface pour maintenir le ROV sur la bonne voie. En intégrant le planificateur de mission, les opérateurs peuvent suivre la position du ROV en surface et la corréler avec des coordonnées connues, garantissant ainsi une navigation précise pendant les études sous-marines, les inspections et la maintenance des actifs.

La navigation à l’estime est une méthode de navigation fondamentale utilisée en l’absence de signaux GPS. Elle calcule la position en suivant la direction et la distance parcourue à partir d’un point de départ connu. Les ROV Deep Trekker utilisent cette méthode, combinée aux données des capteurs, pour maintenir la précision du positionnement, même dans des environnements sous-marins complexes.
Grâce à une combinaison de capteurs inertiels, de gyroscopes, d’accéléromètres et d’algorithmes avancés, associés à la navigation acoustique (DVL), la mise en œuvre de la navigation à l’estime par Deep Trekker permet aux opérateurs d’obtenir une conscience spatiale précise et de naviguer en toute confiance sans GPS.
Cette méthode est particulièrement utile pour les missions de longue durée, où des mises à jour continues de la position sont essentielles. Grâce à la navigation à l’estime, les inspecteurs peuvent suivre la position du ROV par rapport à des points de repère prédéfinis ou à des trajectoires planifiées, ce qui permet de s’assurer que l’inspection ne dévie pas de sa trajectoire et qu’elle couvre bien toutes les zones cibles.
Le planificateur de mission de Deep Trekker utilise des algorithmes avancés pour une navigation intelligente, permettant aux opérateurs de préprogrammer des itinéraires. Il intègre les données des différents systèmes de navigation du ROV, offrant ainsi une vue d’ensemble de la trajectoire de la mission.
Après étalonnage, le ROV est prêt à commencer à naviguer en quelques secondes. Les points de passage peuvent être rapidement ajoutés par glisser-déposer ou en téléchargeant des coordonnées prédéfinies via un fichier CSV. Une fois la trajectoire définie, le ROV navigue de manière autonome entre les points de passage, avec des paramètres de vitesse et de profondeur réglables, tout en capturant simultanément des données tout au long de la mission. Les opérateurs peuvent utiliser le planificateur de mission pour suivre la progression en temps réel, effectuer des ajustements ou examiner les données après l’opération, afin de s’assurer qu’aucune zone n’est négligée lors des enquêtes et des inspections.

Les environnements sous-marins manquent souvent de références visuelles fiables, ce qui rend difficile la connaissance de l’emplacement exact des équipements ou des dangers. Cela est d’autant plus important dans les eaux profondes, où la visibilité est limitée et où l’accès humain est souvent restreint.
Dans les opérations sous-marines, la précision détermine le succès de tâches telles que les inspections structurelles, les relevés bathymétriques ou l’extraction de ressources. Ces tâches impliquent souvent de vastes zones d’intérêt où la collecte de données précises est essentielle.
Les ROV Deep Trekker permettent d’atteindre ce niveau de précision grâce à une combinaison de technologies avancées qui fonctionnent ensemble pour fournir des mises à jour continues sur la position du ROV.
Par exemple :
Construction sous-marine : Les ingénieurs font appel aux ROV pour surveiller et aider à la construction de structures sous-marines, telles que les plates-formes pétrolières ou les parcs éoliens. La précision du positionnement permet de s’assurer que les composants sont installés correctement et que les inspections pendant et après l’installation sont exactes.
Surveillance de l’environnement : les scientifiques qui effectuent des études sous-marines utilisent les ROV pour suivre et surveiller les écosystèmes marins. Un positionnement précis garantit que les données sont collectées à partir d’emplacements cohérents, ce qui permet un suivi efficace de l’évolution de la biodiversité au fil du temps.
Pour les inspections sous-marines, il est essentiel de pouvoir revenir à des points précis afin de surveiller les changements ou les dégradations au fil du temps. Les systèmes acoustiques tels que l’USBL, associés au GPS du ROV, permettent aux opérateurs de retracer avec précision les trajets d’inspection précédents. Dans les études sous-marines, le DVL et la navigation à l’estime fournissent des données cohérentes même lorsque les signaux satellites ne sont pas disponibles. Ces méthodes aident les ROV à maintenir un positionnement précis, essentiel pour construire des modèles 3D fiables des structures sous-marines.

Voici quelques opérations sous-marines clés qui bénéficient d’un positionnement fiable :
Maintenance des actifs : Les inspections régulières des équipements sous-marins, tels que les plates-formes pétrolières et les filets d’aquaculture, dépendent d’un suivi précis pour assurer une couverture complète de la zone d’inspection.
Levés sous-marins : Les scientifiques et les ingénieurs qui effectuent des études géologiques ou environnementales ont besoin de données précises pour cartographier les fonds marins ou surveiller les écosystèmes.
Inspections de pipelines : Les oléoducs et les gazoducs doivent être inspectés en permanence pour éviter les fuites ou la corrosion, ce qui nécessite souvent des navigations de plusieurs kilomètres sous la surface.
Des technologies de positionnement précises sont essentielles pour améliorer la qualité des données et l’efficacité opérationnelle des inspections et des études sous-marines, telles que l’évaluation des pipelines et des évaluations environnementales. Un suivi fiable de la localisation garantit des inspections approfondies et une collecte de données fiable, minimisant ainsi le risque d’évaluations manquées ou incomplètes.
Lorsque le positionnement est précis, les opérateurs peuvent recueillir des données complètes sans lacunes ni redondances, ce qui facilite l’analyse détaillée. Pour la maintenance des actifs, la connaissance de l’emplacement exact des défauts ou de la corrosion permet de cibler les réparations, ce qui réduit les temps d’arrêt.
Dans les études sous-marines, un positionnement précis facilite la création de modèles 3D du terrain et des structures, ce qui est essentiel pour la surveillance de l’environnement, où les changements dans la topologie ou la flore des fonds marins doivent être détectés au fil du temps. Dans des contextes commerciaux tels que l’installation de câbles sous-marins, une navigation précise permet d’éviter des erreurs coûteuses, telles qu’un détournement inutile ou des points d’inspection négligés.
Les progrès de la navigation sous-marine permettent aux ingénieurs et aux scientifiques d’améliorer la résolution des données, ce qui réduit les erreurs et la nécessité d’effectuer de nouvelles visites lors des études ou des inspections.
Le choix de la méthode de navigation sous-marine appropriée dépend de l’environnement opérationnel spécifique et des objectifs de la mission. Des espaces confinés aux eaux libres, chaque scénario présente des défis uniques. Vous trouverez ci-dessous un aperçu des méthodes les mieux adaptées aux différentes tâches sous-marines, ainsi que des exemples d’applications réelles.

Pour les inspections de la coque des navires, la navigation à l’estime et le GPS ROV constituent des solutions de navigation efficaces. La navigation à l’estime est particulièrement adaptée aux inspections de coques, car elle évite de déployer un système USBL, qui peut se heurter à des limites lorsque le navire fait obstacle aux pings. La navigation à l’estime garantit un positionnement précis le long de la coque, ce qui permet d’effectuer des inspections approfondies, même dans des environnements dépourvus de GPS. Combiné au mode Gyro uniquement, le Dead Reckoning évite les problèmes d’interférences magnétiques, garantissant ainsi des relevés précis pendant l’inspection.
Lorsque le ROV fait surface, le GPS ROV recalibre sa position, ce qui permet un suivi précis de la surface par rapport au navire. Si l’USBL est souvent utilisé dans les eaux peu profondes, il est moins pratique pour les coques de navires en raison de l’obstruction potentielle des signaux acoustiques.
Meilleure méthode de navigation : La navigation à l’estime avec le mode gyroscope seul, combiné avec le GPS du ROV pour un suivi continu, sans interférence et un recalibrage précis de la surface.
Lors des missions de recherche et de récupération, l’environnement est souvent imprévisible, allant des eaux côtières peu profondes aux zones offshore plus profondes. La navigation à l’estime est utile pour maintenir un suivi continu lorsque les systèmes GPS ou acoustiques ne sont pas disponibles, par exemple dans des eaux troubles ou encombrées. Le planificateur de mission est également utile pour suivre les trajets d’inspection et éviter les recherches redondantes dans des zones déjà explorées en profondeur.
Meilleure méthode de navigation : La navigation à l’estime pour un suivi ininterrompu dans les zones à faible visibilité ou à signal limité, avec le planificateur de mission pour gérer la couverture et éviter les efforts redondants.
Les inspections de sécurité portuaire ont souvent lieu dans des environnements troubles ou confinés. Dans ce cas, les unités de mesure inertielle (IMU) combinées à la navigation à l’estime sont très efficaces, en particulier lorsque les signaux acoustiques peuvent être déformés par les réflexions de l’infrastructure portuaire. Ces méthodes permettent aux ROV de suivre leur position même lorsque les indices visuels ou les signaux externes sont limités.
Meilleure méthode de navigation : La navigation à l’estime, complétée par l’USBL ou le GPS ROV dans les zones ouvertes du port.
Les missions de sciences marines, telles que la cartographie des fonds marins et les études écologiques, nécessitent un large éventail de capacités de navigation. L’USBL est préféré pour les eaux libres en raison de sa grande précision à différentes profondeurs. Pour l’exploration des grands fonds, le DVL (Doppler Velocity Log) peut aider à maintenir des mesures de vitesse précises par rapport au fond marin, tandis que le GPS du ROV fournit des références de surface lorsqu’il opère près de la surface de l’eau.
Meilleure méthode de navigation : USBL pour les opérations en eaux profondes, avec DVL et ROV GPS pour le suivi en surface.
Les inspections offshore des plates-formes pétrolières, des pipelines et des infrastructures sous-marines exigent une grande précision de positionnement et la capacité de naviguer dans des environnements complexes. Les systèmes USBL sont souvent utilisés pour un positionnement précis, tandis que les systèmes IMU permettent une navigation à l’estime pour maintenir la position dans des zones où les signaux acoustiques peuvent être bloqués par de grandes infrastructures.
Meilleure méthode de navigation : USBL avec calcul à l’estime basé sur l’IMU pour un positionnement cohérent autour de structures offshore complexes, ou GPS ROV et calcul à l’estime peuvent s’avérer judicieux en fonction de l’emplacement de la structure.
Les inspections à l’intérieur des réservoirs d’eau ou des bassins de refroidissement des centrales nucléaires nécessitent une navigation précise et confinée. La navigation à l’estime est souvent la meilleure méthode dans ces situations, car elle permet une navigation continue dans des zones où les signaux externes tels que le GPS ou le suivi acoustique peuvent être bloqués par des structures métalliques.
La meilleure méthode de navigation : La navigation à l’estime pour un suivi précis dans des environnements confinés et bloqués par des signaux.
Les inspections des parcs aquacoles sont souvent effectuées dans les eaux côtières, où la navigation à l’estime et le GPS ROV sont plus adaptés que l’USBL en raison des défis posés par les filets et les interférences avec les poissons, qui peuvent perturber les signaux acoustiques de l’USBL. Le Dead Reckoning permet une navigation précise à l’intérieur de l’enclos, en maintenant la précision même lorsque les signaux GPS ne sont pas disponibles. Le GPS ROV peut aider au positionnement au niveau de la surface pour assurer une couverture complète du périmètre de l’enclos et des infrastructures, telles que les filets ou les points d’ancrage.
Meilleure méthode de navigation : La navigation à l’estime pour le suivi continu sous l’eau, complétée par le GPS ROV pour le recalibrage au niveau de la surface et la couverture du périmètre.
Lors de l’inspection de pipelines ou de tunnels de l’intérieur, l’estime permet une navigation continue dans des environnements confinés ou longs et rectilignes. Les systèmes acoustiques tels que l’USBL peuvent être inefficaces dans ces environnements en raison de la réflexion des signaux ou des obstructions causées par les parois du pipeline.
Meilleure méthode de navigation : L’estime pour les inspections linéaires en milieu confiné.
Lors de l’inspection de pipelines ou de câbles au fond de la mer depuis l’extérieur, le ROV peut utiliser un système de positionnement acoustique tel que l’USBL. En fonction de la profondeur et de la longueur, l’utilisateur peut préférer ne pas avoir à remonter à la surface pour recalibrer la position. Dans ce cas, l’USBL via notre progiciel NAV est probablement la méthode préférée pour effectuer le relevé.
Meilleure méthode de navigation : USBL avec GPS différentiel
Pour les inspections de réservoirs d’eau, les systèmes de positionnement acoustique tels que l’USBL peuvent ne pas être viables en raison de la nature réfléchissante des parois des réservoirs. L’estime est la méthode la plus efficace pour un suivi continu dans ces environnements confinés. Elle garantit un positionnement précis, même lorsque les signaux acoustiques ou GPS ne sont pas disponibles.
Meilleure méthode de navigation : La navigation à l’estime pour les réservoirs d’eau confinés.
D’autres opérations telles que l’inspection de ponts, l’entretien de barrages et l’inspection d’éoliennes offshore dépendent fortement de systèmes acoustiques tels que l’USBL pour une navigation précise. Pour les inspections en milieu confiné, la navigation à l’estime reste la solution principale, tandis que le GPS ROV peut fournir une aide supplémentaire au suivi de la surface lorsque les opérations se déroulent près de la surface.
Meilleure méthode de navigation : USBL ou ROV GPS à l’estime dans les environnements confinés ou d’infrastructures complexes.
La navigation sous-marine est un aspect indispensable des opérations ROV, qui permet aux opérateurs d’effectuer des inspections, des études et la maintenance des actifs avec une grande précision. Les innovations de Deep Trekker en matière de navigation à l’estime, de GPS pour ROV et de logiciel de planification de mission offrent des solutions fiables aux défis de longue date de la navigation sous-marine. Ces technologies améliorent non seulement l’efficacité opérationnelle, mais aussi la sécurité et la fiabilité des opérations sous-marines.
En améliorant continuellement ces systèmes de navigation, Deep Trekker aide les organisations et les chercheurs à accomplir des tâches sous-marines avec précision et confiance, en tirant parti de ces outils pour fournir des performances précises et fiables dans une variété d’environnements sous-marins.
Notre équipe qualifiée est prête à fournir des conseils d’expert pour une gamme variée d’applications, y compris les inspections de coque de navires, les évaluations de réservoirs d’eau et les études sous-marines dans de nombreux secteurs. Nous fournissons des solutions personnalisées adaptées à vos besoins spécifiques.
Depuis 2014, Escadrone accompagne ses clients dans l’intégration de la robotique autonome pour des usages civils professionnels.
Pionnière dans la conception, la vente, l’homologation de drones et la formation à ses usages et métiers, elle se positionne comme experte de son domaine et connaît parfaitement tous les acteurs et les produits du marché.
Escadrone vous supporte sur l’ensemble de la chaîne de valeurs depuis la formation à vos outils de collecte d’informations jusqu’au traitement et l’interprétation de vos données.









