Accueil > Boutique > Drones sous-marins > Deep Trekker Spectra
DEMANDEZ UN DEVIS
Deep Trekker Spectra
Conçu pour les missions d’inspection, de réparation et de maintenance (IRM) en mer, le SPECTRA assure un fonctionnement stable dans des courants pouvant atteindre 4 nœuds, une capacité de plongée jusqu’à 1 000 mètres, un outillage CND intégré et une cartographie 3D en temps réel. Il est conçu pour une mobilisation rapide, une maintenance modulaire et des opérations sous-marines avec un temps de disponibilité élevé.
Disponible sur commande


Le Deep Trekker Spectra intègre une double caméra stéréo 4K, spécifiquement conçue pour la photogrammétrie et la génération de jumeaux numériques en milieu sous-marin. Ce système optique capture des images de 12 MP, permettant une modélisation précise des structures et des actifs, même dans les environnements privés de signal GPS. Couplée à un éclairage puissant de 300 000 lumens et à la technologie de navigation 3D Sonar SLAM, cette configuration garantit des relevés répétables et une cartographie 3D d’une grande clarté. Ces capacités font du Spectra un outil de choix pour les missions d’inspection, de réparation et de maintenance (IRM) exigeant une visualisation détaillée et une analyse précise des défauts.
Le dispositif USBL permet de surveiller en temps réel la position du ROV lorsqu’il se déplace sous l’eau. Les applications de suivi permettront de connaître la position du ROV, de suivre sa trajectoire sous l’eau, de resituer des emplacements géo-localisés (position X,Y,Z). Les opérateurs pourront aussi visualiser la taille du site à investiguer et planifier un parcours de mission de manière autonome.
Le dispositif DVL va garantir un maintien de position et d’altitude même dans des courants difficiles. L’USBL combiné à un DVL offre une précision à moins d’1 mètre.

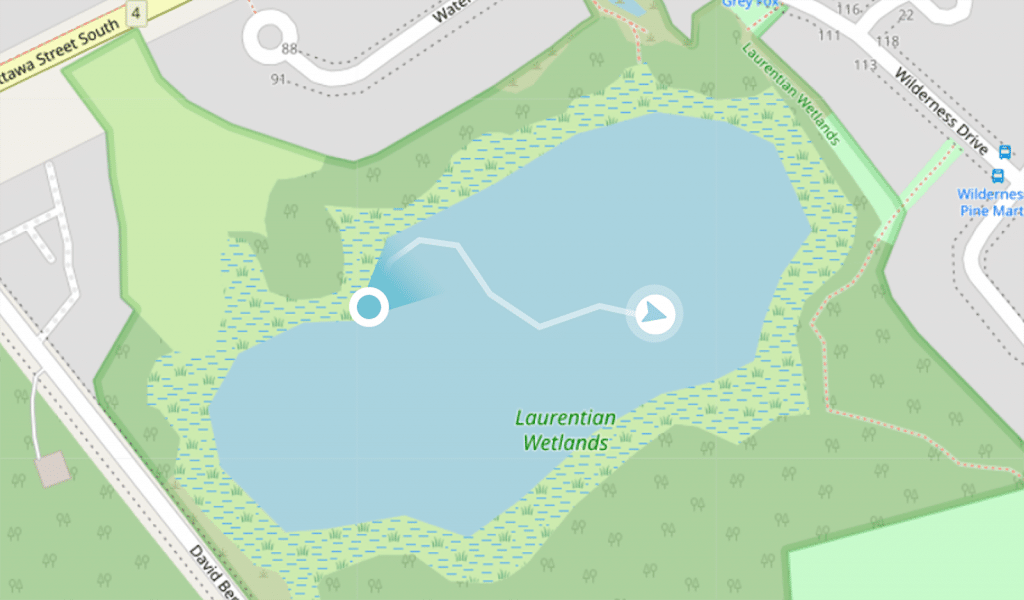
La technologie de navigation à l’estime ou dead reckoning, est au cœur des opérations du ROV Deep Trekker Spectra dans les milieux subaquatiques privés de GPS. Ce système estime la position du ROV en continu, en cumulant les données de cap, de vitesse et de temps à partir d’un point initial connu. Pour ce faire, il s’appuie sur des capteurs embarqués comme les IMU (unités de mesure inertielle) et les DVL (Doppler Velocity Logs), dont les données sont fusionnées par des algorithmes propriétaires. Cette approche, bien que sensible à la dérive cumulative, garantit une navigation fiable pour des missions critiques comme l’inspection de coques de navires ou de pipelines.
Cartographie de site
Visualisation d’actifs
Mesure de défauts
Détection de changements

Conscience situationnelle en temps réel
Visualisation des actifs
Retour sur l’orientation du véhicule
Export de nuages de points (.PLY)
Maintien de position automatique
Acquisition de données et rapports intégrés
Options de pilotage flexibles
Contrôle à faible latence
Déploiement rapide sans calibration
Suivi de position en environnements sans signal GPS
Historique du suivi de position
Enregistrement des données de waypoints GPS
D’un contrôleur portatif à une configuration de console entièrement intégrée, notre nouvelle console BRIDGE offre une flexibilité de pilotage inégalée. Que vous ayez besoin de mobilité ou d’une station de contrôle complète, profitez d’une configuration qui s’adapte à votre mission.

Amélioration automatique de l’image
Filtrage de la turbidité
Pan/Tilt/Zoom (PTZ) numérique
Performances en basse lumière
ESCADRONE accompagne ses clients dans la prise en main des ROV’s pour leur permettre d’acquérir rapidement les compétences de pilotage. La formation est assurée en mode présentiel dans nos locaux (Isère) ou chez le client.
Nous avons aussi déployé un enseignement e-learning pour nos clients étrangers.
Notre service SAV, disponible 5j/7 de 9h à 18h reste disponible pour vous répondre.
Nous gérons également la relation avec le fabricant en cas d’anomalie. Dans le cas d’un retour matériel chez le fabricant au Canada, nous gérons l’enlèvement du matériel dans la limite de la garantie.Les opérateurs ROV pourront aussi visualiser la taille du site à investiguer et planifier un parcours de mission de manière autonome.
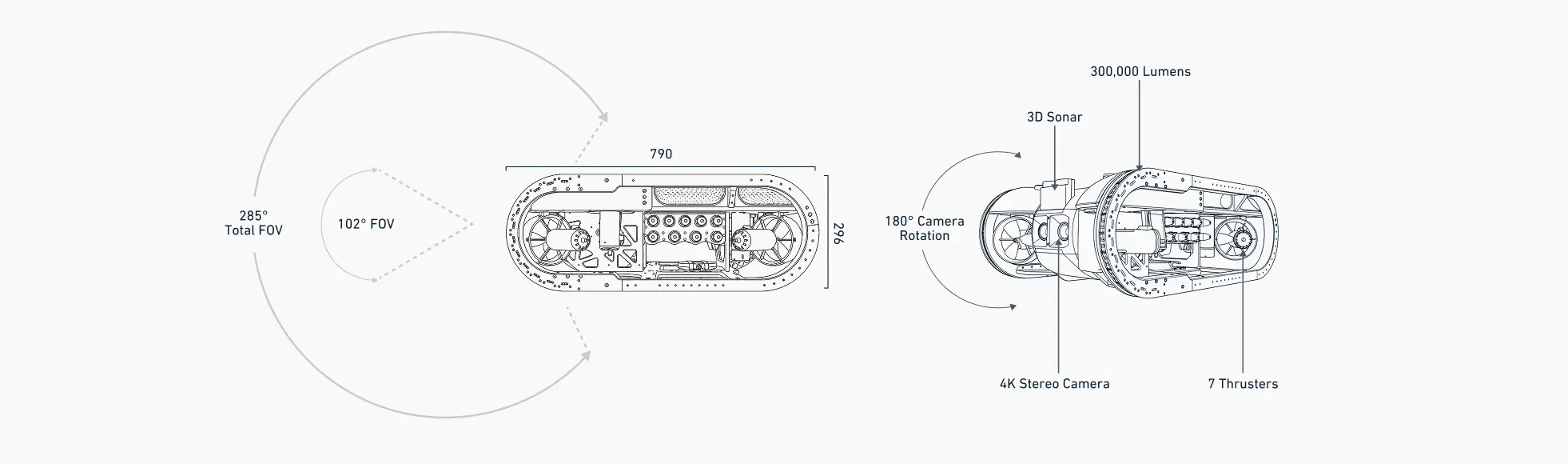
Le Deep Trekker Spectra combine les capacités d’un ROV « Work-class » avec la portabilité d’un drone compact. Sa double caméra stéréo 4K et son Sonar SLAM 3D permettent de réaliser des photogrammétries précises et de naviguer avec fiabilité en environnements complexes, même sans signal GPS.
Capable de résister à des courants de 4 nœuds et certifié pour 1 000 mètres de profondeur, c’est un outil robuste et facile à maintenir pour les inspections offshore exigeantes.
Il est recommandé de le désinfecter avec du chlore puis de le rincer à l’eau douce. Des utilisateurs utilisent généralement une solution de chlore à 200 ppm pour la désinfection à l’aide d’un vaporisateur. Le chlore n’a pas d’effet sur le système.
En référence à la Circulaire n° 2002/571 du 25 novembre 2002, un ROV n’est pas soumis à l’obligation d’être couvert par une ACS (Attestation de conformité sanitaire).
Vous pourrez uniquement mesurer des épaisseurs des métaux.
Les épaisseurs de briques ou béton ne seront pas possibles.
Plus la fréquence de la sonde est élevée (5MHZ), plus l’acier qu’elle peut mesurer est mince. Il est extrêmement rare qu’une fréquence autre que la fréquence standard de 3,5 kHz soit nécessaire, à moins qu’il ne s’agisse d’un acier très épais ou mince. Pour les inspections de coques et la plupart des autres applications, la fréquence de 3,5 kHz est suffisante.
Le contrôleur dispose de sorties HDMI, Ethernet et USB, il est donc facile de connecter un moniteur externe sans avoir besoin d’options supplémentaires.
Le câble (5mm de diamètre) est composé d’un revêtement en caoutchouc avec une bande de kevlar à l’intérieur pour la résistance et une paire de fils de cuivre de calibre 26 pour le signal. Il est conçu pour être flottant.
Le câble est très résistant. Il est capable de supporté un poids dans l’eau de 90 kg.
Le câble a un rayon de courbure de 0. vous pouvez même faire un nœud dans le câble sans dommage.
La caméra est aussi performante que l’œil humain en ce sens que si l’eau est extrêmement trouble, elle ne verra pas à travers la turbidité. L’utilisation des capteurs « auto-cap » et « auto-profondeur » depuis votre point d’opération vous permettra de naviguer vers l’hélice d’un navire, une prise de barrage ou tout autre endroit que vous souhaitez vérifier, même sans avoir une bonne visibilité lors de la navigation vers la cible.
La meilleure façon de voir à travers l’eau trouble est d’utiliser un sonar d’imagerie 2D. Les sonars peuvent aider à obtenir un visuel à travers l’eau trouble. Les sonars ne trouveront pas de petits défauts ou détails que vous identifieriez avec une caméra, mais vous donneront une meilleure connaissance de la situation. Ceci est particulièrement important dans les applications en eau libre, où il y a un manque de repères visuels. Dans les espaces confinés, vous avez souvent plusieurs structures ou autres indices visuels qui indiquent où vous êtes (un mur, une colonne, un empilement, etc.). Avoir un sonar d’imagerie ainsi qu’un système de positionnement USBL est extrêmement utile pour comprendre où vous êtes, où vous allez et ce que vous regardez.
Les ROV Deep Trekker sont fournis avec un contrôleur équipé de ports micro SD.
Sur le contrôleur vous disposerez de boutons « snapshot » ou « record » sur le côté pour lancer l’enregistrement. Lorsque vous avez terminé, vous pourrez la retirer pour télécharger les fichiers sur un ordinateur.
Le contrôleur portatif du ROV est équipé d’un écran LCD de 7 pouces. L’écran haute définition et lumineux offre une expérience de visualisation portable de haute qualité. Il arrive cependant que vous souhaitiez qu’un écran plus grand affiche la vidéo à un groupe de téléspectateurs. Le contrôleur portable est équipé d’un port de sortie HDMI, ainsi que de ports Ethernet, SD et USB. Cela vous offre la flexibilité de vous connecter à d’autres appareils. Alternativement, le ROV enregistre des vidéos et des photos sur une carte SD. La carte SD peut être facilement retirée puis connectée à d’autres appareils pour la visualisation.
De nombreux signaux qui fonctionnent dans l’air ne fonctionnent pas sous l’eau. Le GPS, le Wi-Fi, le Bluetooth, etc. ne transmettent pas au travers de l’eau. Afin d’avoir un flux vidéo en direct et de contrôler un véhicule sous l’eau, vous avez besoin d’une attache.
C’est une question récurrente mais la réponse n’est pas aussi simple car cela dépend de l’application.
En général, les inspections à l’aide d’un ROV peuvent être divisées en deux catégories principales ; aller jusqu’à un seul point ou faire une évaluation approfondie d’une zone entière.
Lorsque vous allez vers un seul endroit, un ROV est capable de prendre plus de courant car la trajectoire qu’il faut pour y arriver n’a pas d’importance tant qu’il atteint la cible. Il existe des outils pour vous guider, tels que les systèmes de positionnement USBL, les sonars d’imagerie ou même les capteurs de cap et de profondeur.