Cette illustration créée par Jethro Hazelhurst représente les connections entre les différents éléments un aéronef multirotor doté du dernier contrôleur de vol Pixhawk de 3D Robotics.
Il ne s’agit que d’une des multiples configuration possibles, on pourrait très bien ajouter des moteurs, ne pas utiliser de nacelle ou de télémétrie, ajouter des batteries, un sonar, etc.
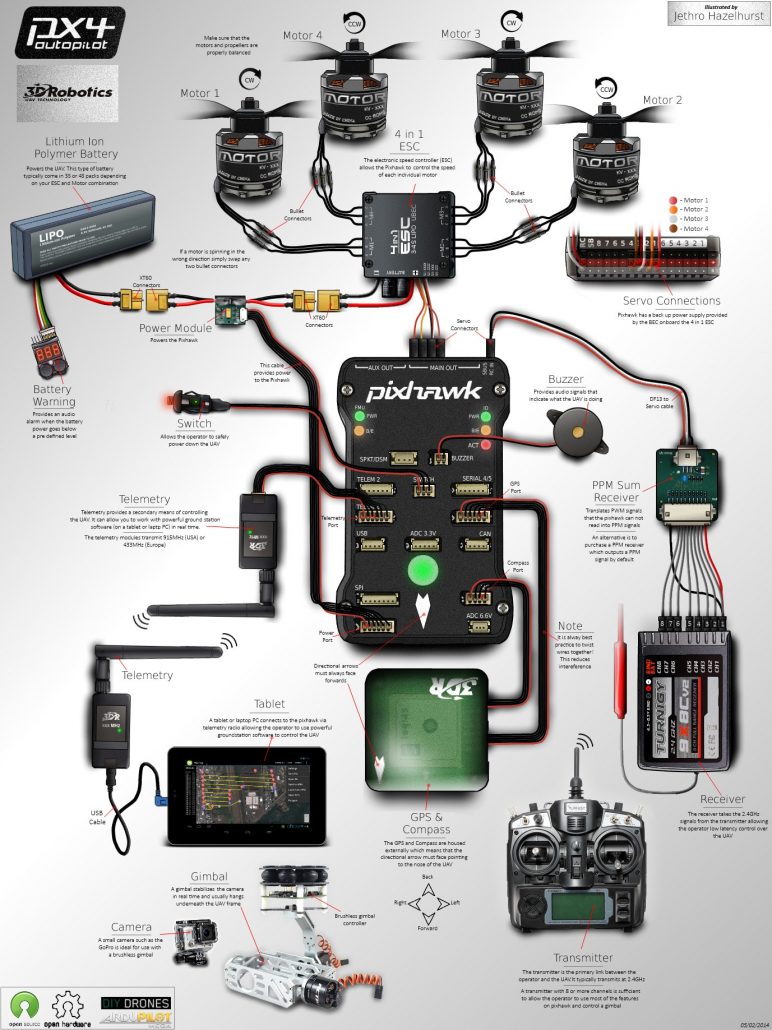
Article original : http://diydrones.com/profiles/blogs/pixhawk-infographic?id=705844%3ABlogPost%3A1552496









