Accueil > Publications > LiDARs L2 vs L1 : comparatif de modélisation sous canopée
Comparaison des lidars DJI L2 et L1 pour la numérisation sous canopée
Essais comparatifs entre le L1 et le L2 sur leur capacité à numériser sous canopée et le niveau de détail qui peut être produit.
Introduction
Cet article présente deux essais comparatifs entre les lidars L1 et L2, avec pour objectif d’évaluer leur capacité à numériser sous canopée et le niveau de détail qu’ils peuvent produire. Les essais ont été réalisés à l’aide du matériel listé dans l’article et les données ont été traitées sur DJI Terra et analysées dans CloudCompare.
Les essais ont été réalisés sur deux zones de test : la première composée de bâtiments et divers ouvrages, pour évaluer la capacité à numériser des structures complexes ; la deuxième composée d’un champ, une route et une forêt en feuille, pour évaluer la capacité de pénétration de végétation.
LiDAR DJI Zenmuse L2
Caractéristiques principales :
Haute précision : verticale 4cm / horizontale 5cm (c’est deux fois mieux que le L1 !)
Spots lasers plus petit pour une meilleure pénétration et des objets plus détaillés (très utile en foresterie par exemple)
Fréquence de captation de 240000 tirs/sec avec jusqu’à 5 échos (5×240 000 pts/s) contre 240 000 tirs/sec avec 3 échos sur le L1 (3×160 000 pts/s)
Meilleure caméra visible, plus de données captées car le capteur est plus grand et il dispose d’un intervalle photo minium de 0,7s, ce qui permet une captation beaucoup plus rapide en photogrammétrie.
Première zone de tests : bâtiments & infrastructures
Cette zone est composée de bâtiments, et divers ouvrages, on s’intéresse ici a la capacité de numériser des structures complexes.
Les paramètres choisi pour la configuration des lidars et du vols sont :
Hauteur de vol : 50m
Vitesse de vol : 5m/s
Nombre d’echo : nombre max (3 pour le L1 et 5 pour le L2)
Pattern de scan : non repetitive
Observons le détail au niveau de l’escalier métallique entourée sur la photo ci-dessus.
Sur le nuage produit par le Lidar L2 on note un niveau de détail qui permet de compter le nombre de marche.
Sur le nuage de point du L1 on ne peut qu’identifier le palier haut et bas ainsi que l’inclinaison mais on ne saurait différencier à partir de ce résultat ci c’est un escalier ou une pente.
Regardons maintenant sur une façade, on peut noter une densité de points nettement supérieure sur le L2.
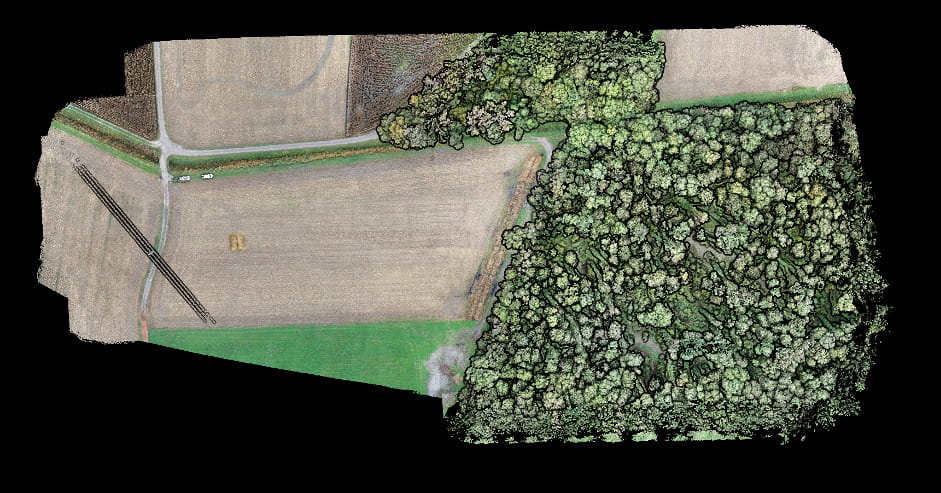
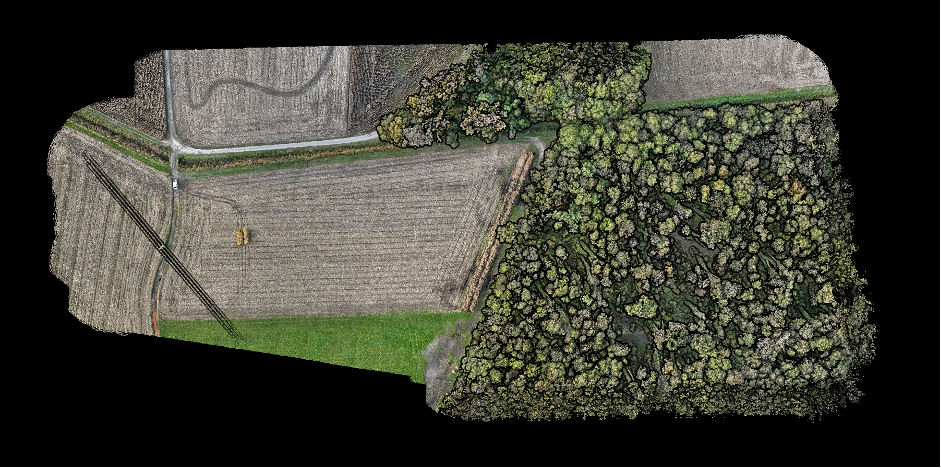
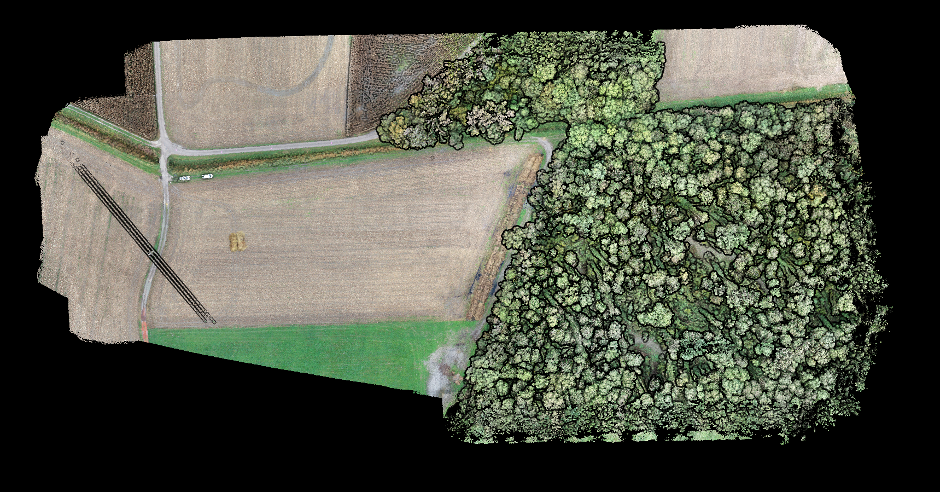
Deuxième zone de tests : champs & foresterie
Cette zone est composée d’un champ, une route et une forêt en feuille, on s’intéresse ici a la capacité de pénétration de végétation.
Les paramètres choisi pour la configuration des lidars et du vols sont :
Hauteur de vol : 50m
Vitesse de vol : 5m/s
Nombre d’echo : nombre max (3 pour le L1 et 5 pour le L2)
Pattern de scan : non repetitive
Répartition des points
L1
L2
L2vsL1
Nombre de point total
115810169
100%
155958563
100%
35%
Nbr de pts echo 1
79957283
69%
121620808
78%
52%
Nbr de pts echo 2
25855227
22%
27453776
18%
6%
Nbr de pts echo 3
9997659
9%
6080740
4%
-39%
Nbr de pts echo 4
747715
0,5%
Nbr de pts echo 5
55524
0,04%
Nbr de pts sol
43767291
38%
65871701
42%
51%
On note que le L2 produit 35% de points de plus que le L1 mais surtout plus d’écho 1 et plus de points sol sous canopée.
On va par la suite s’intéresser à la répartition des ces points sur la couche végétale.
Durée de vol L1
Durée de vol L2
Résultats
Vue générale
Détail poteau
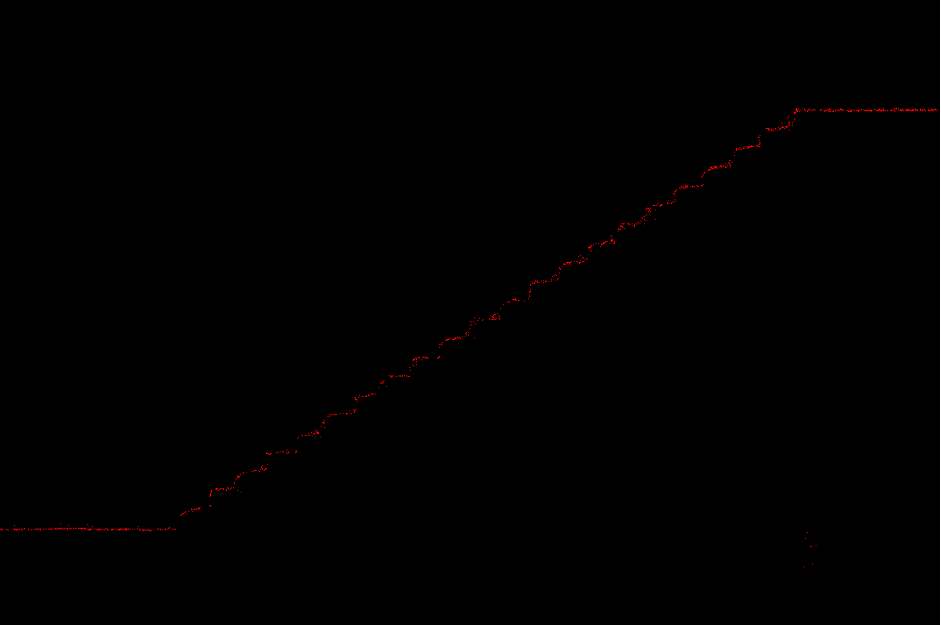
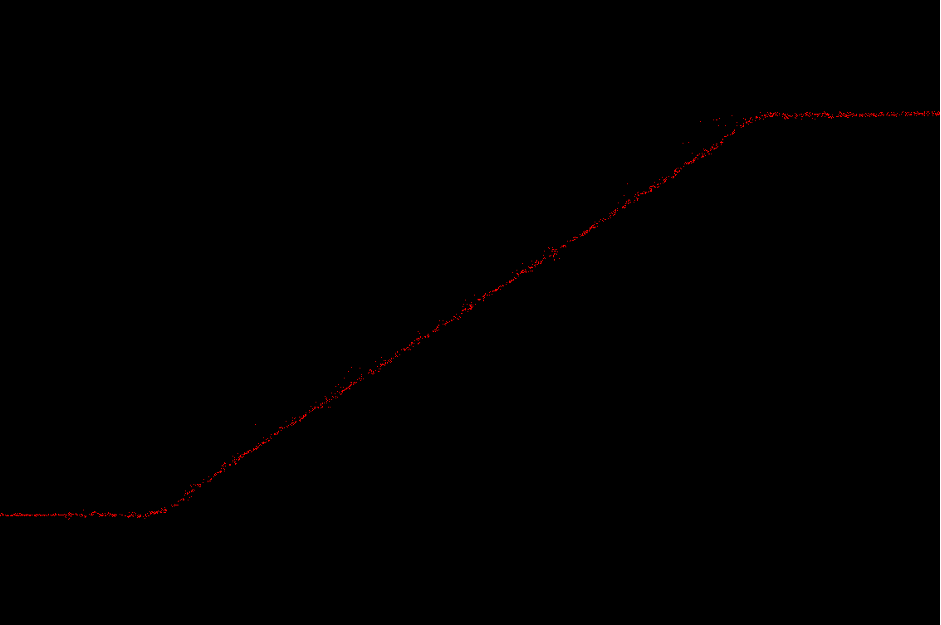
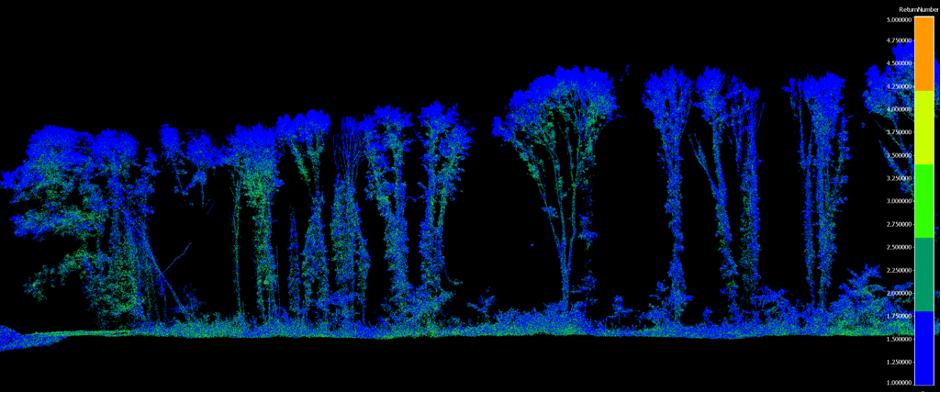
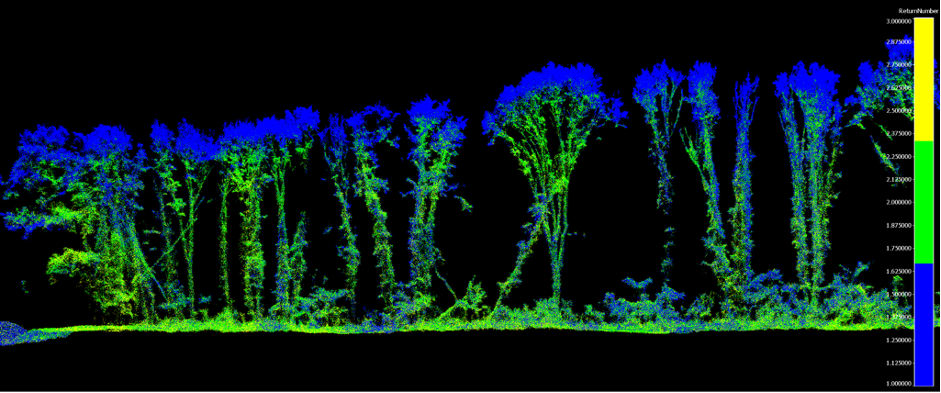
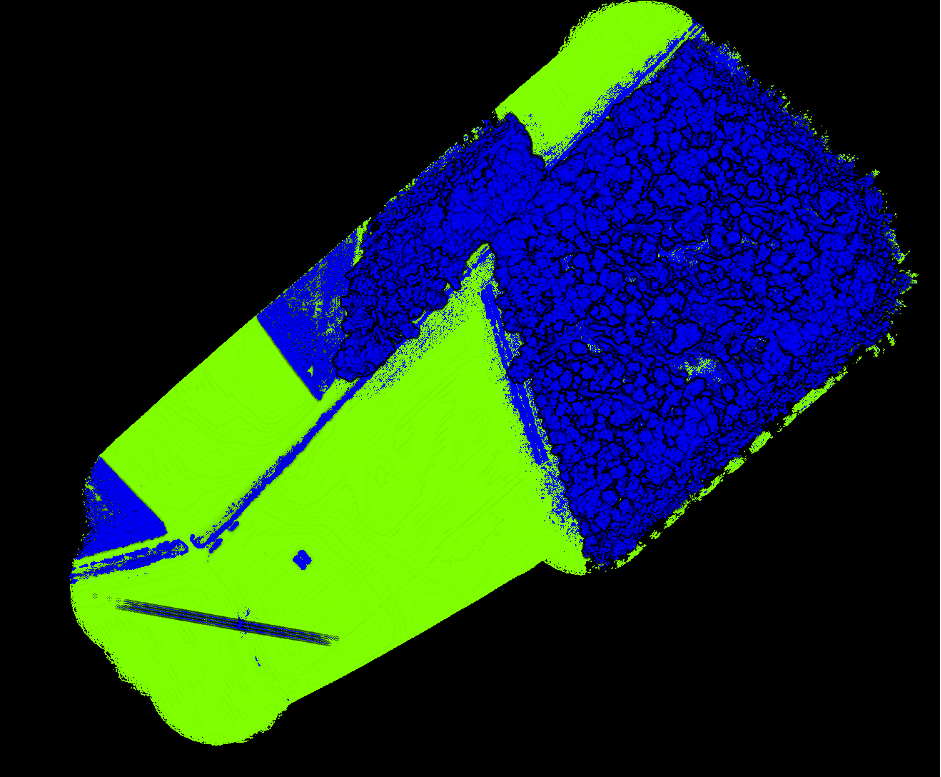
Répartition des échos sur la canopée
On note un concentration de l’echo 1 sur le haut de la canopée sur le rendu L1 alors que sur le L2 la pénétration est bien meilleure.
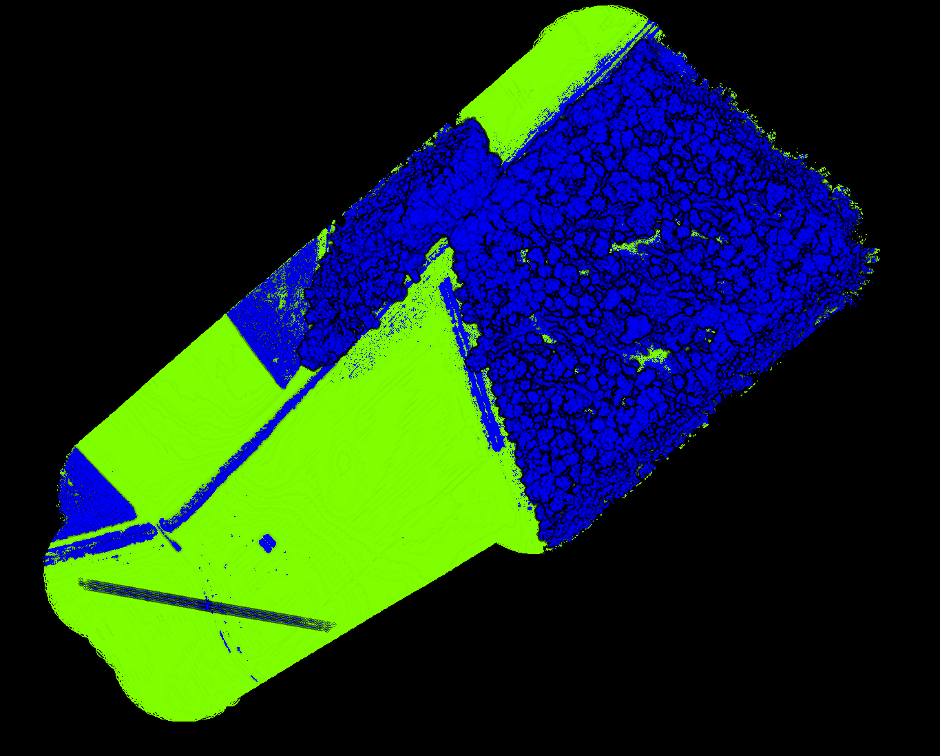
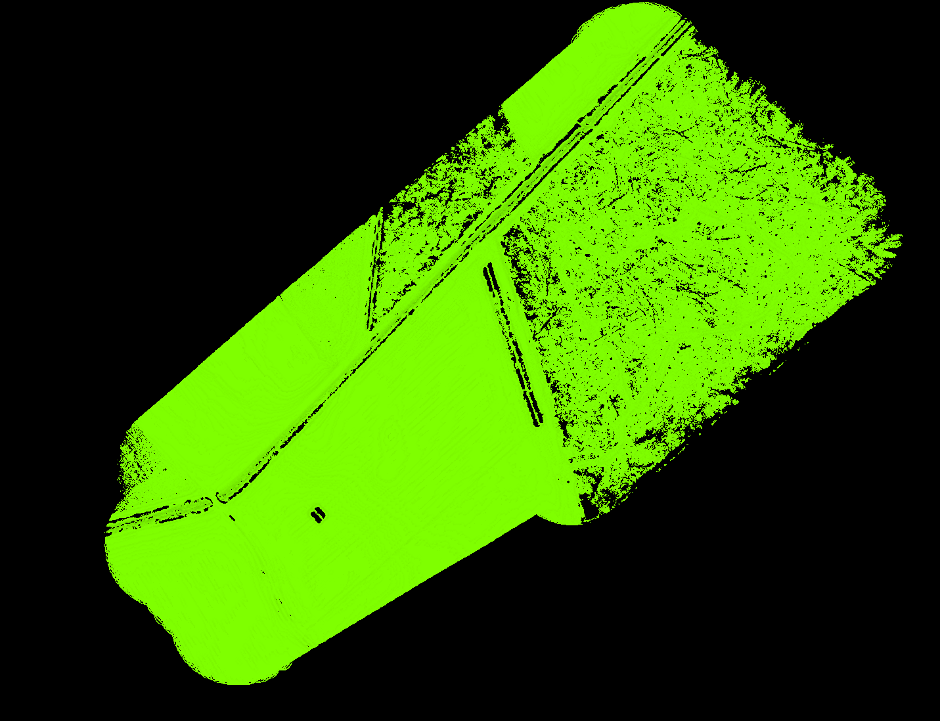
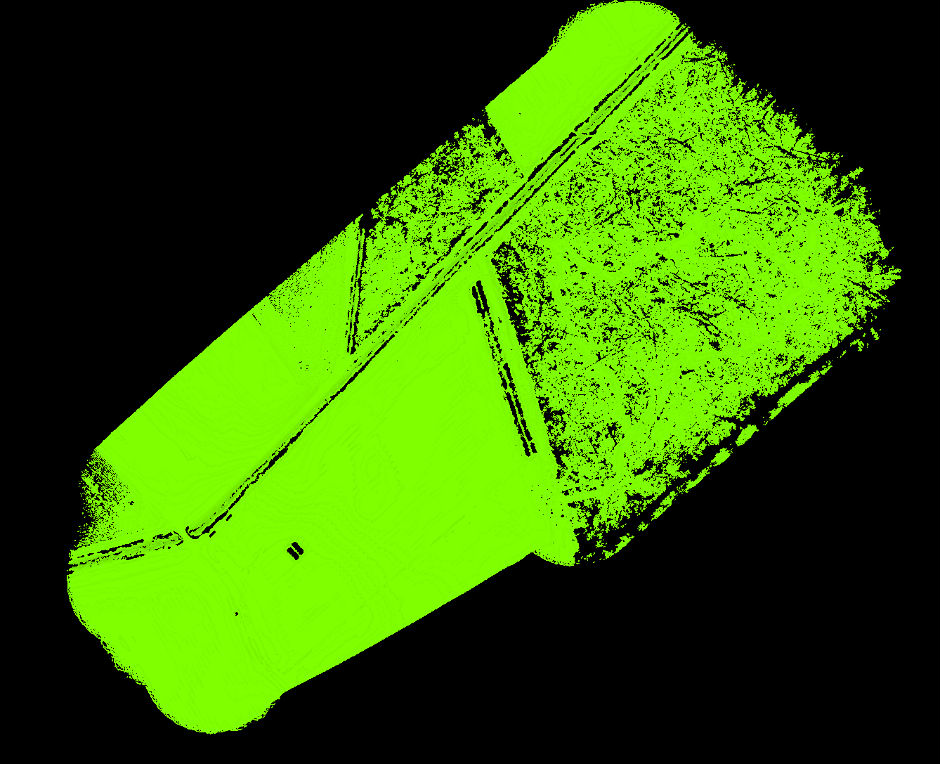
Classification sol/non sol
Points sol
On note une meilleur densité de point sol sur le nuage de point issu du L2.
Conclusion du comparatif L2 VS L1
En conclusion, les résultats des deux essais présentés montrent que le liDAR L2 a une capacité supérieure à celles du L1 pour numériser sous canopée et produire des détails plus fins. Dans la première zone de test, le L2 a permis de numériser avec précision des structures complexes telles qu’un escalier métallique et une façade, avec une densité de points nettement supérieure à celle du L1. Dans la deuxième zone de test, le L2 a produit 35% de points de plus que le L1 et une meilleure pénétration de l’écho 1 dans toute la hauteur de la végétation, avec une meilleure densité de points sol sur le nuage de points L2.
Ces résultats démontrent que le L2 est un choix préférable pour les applications de numérisation précise de l’environnement, telles que la cartographie de forêts, la modélisation de bâtiments et d’infrastructures, ou encore la surveillance de l’érosion des sols.
La réduction de la taille du spot sur le L2 tient ces promesses en termes de capacité à pénétrer la canopée. En comparaison au L1 c’est 50% de point sol supplémentaire et des echos 1 beaucoup plus pénétrant ! Couplés à l’amélioration de la centrale inertielle, c’est aussi moins de bruit et beaucoup plus de détails!
CONTACTEZ-NOUS !
Depuis 2014, Escadrone accompagne ses clients dans l’intégration de la robotique autonome pour des usages civils professionnels.
Pionnière dans la conception, la vente, l’homologation de drones et la formation à ses usages et métiers, elle se positionne comme experte de son domaine et connaît parfaitement tous les acteurs et les produits du marché.
Escadrone vous supporte sur l’ensemble de la chaîne de valeurs depuis la formation à vos outils de collecte d’informations jusqu’au traitement et l’interprétation de vos données.