Le Pixhawk 2 à été conçu par la communauté Pixhawk open hardware en collaboration avec 3DRobotics et fut d’abord dévoilé sur le drone 3DR Solo. Bien qu’initialement prévu pour être produit en version « standalone » (seule) par 3DRobotics, il ne fut disponible que 2 ans plus tard grâce aux efforts d’un certain Hex66 et de ProfiCNC.
De multiples configurations supportées : VTOL, avion, multi-rotor, helicopter traditionnel, voiture, bateau, sous-marin et robotique en général.
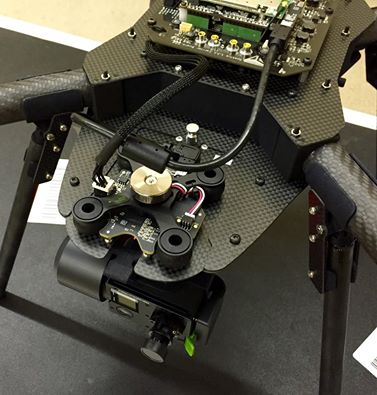
La modularité du Pixhawk 2 lui permet d’adopter différente formes et de s’adapter à de multiples plate-formes.
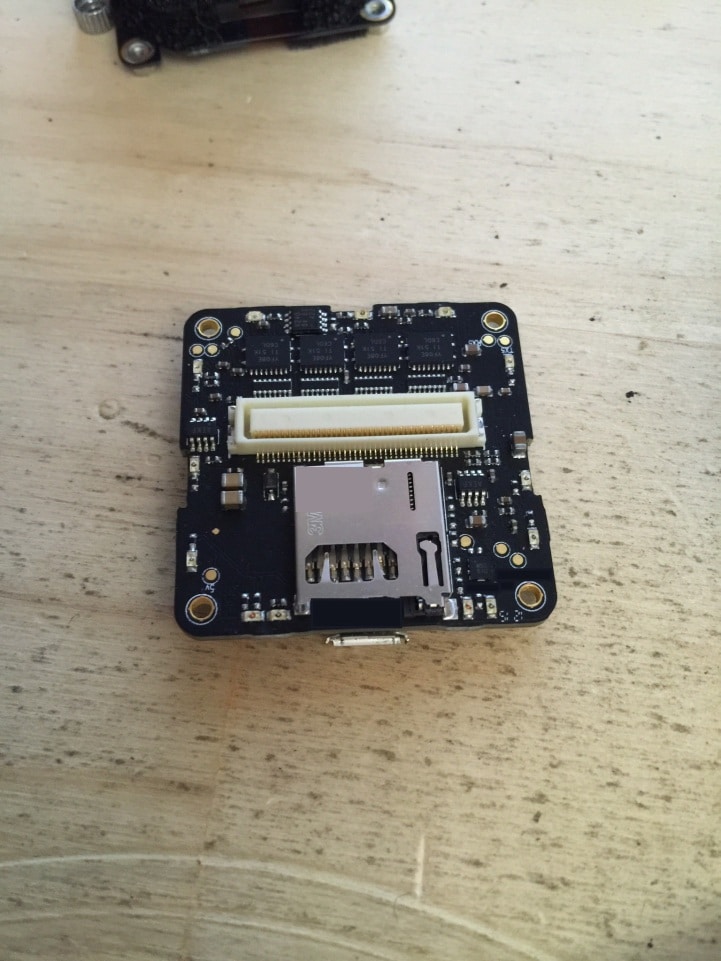
Un gros avantage du Pixhawk 2 est so n connecteur DF17 unique sur la base qui permet de tester et de calibrer en usine. Il n’est pas un produit de 3DRobotics, ce projet à été poussé et conçu par la communauté et fait pour la communauté.
Voici les principaux avantages du Pixhawk 2 :
Conception modulaire, large choix de carte porteuses (carrier board)
100% prêt pour accueillir un GPS RTK, le Multi GPS est standard sur le Pixhawk
Triple redondance des centrales inertielles (IMU)
Centrales inertielles isolées, amorties avec contrôle de la température
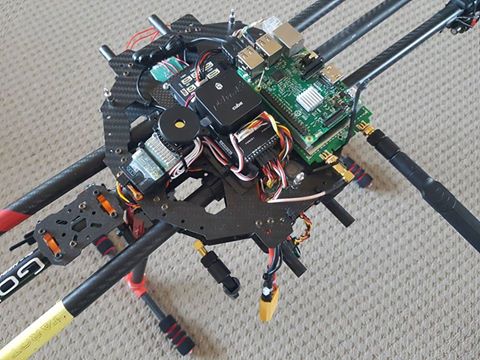
Port intégré pour mini ordinateur Intel Edison. Une solution simple pour ajouter plus de puissance de calcul avec un seul connecteur.
Systèmes de centrales inertielles (IMU) et système de gestion de vol (FMU) séparés afin de réduire les interférences avec les capteurs.
Mousse pour réduire les vibrations haute fréquence et le bruit mesuré par les capteurs.
Centrales inertielles à température contrôlée. Une résistance générant de la chaleur est intégrée afin de contrôler la température des IMUs. Fonctionne sans problème en dessous de 0°.
Le Pixhawk 2.1 a énormément évolué par rapport aux versions précédentes, sous tout les aspects.
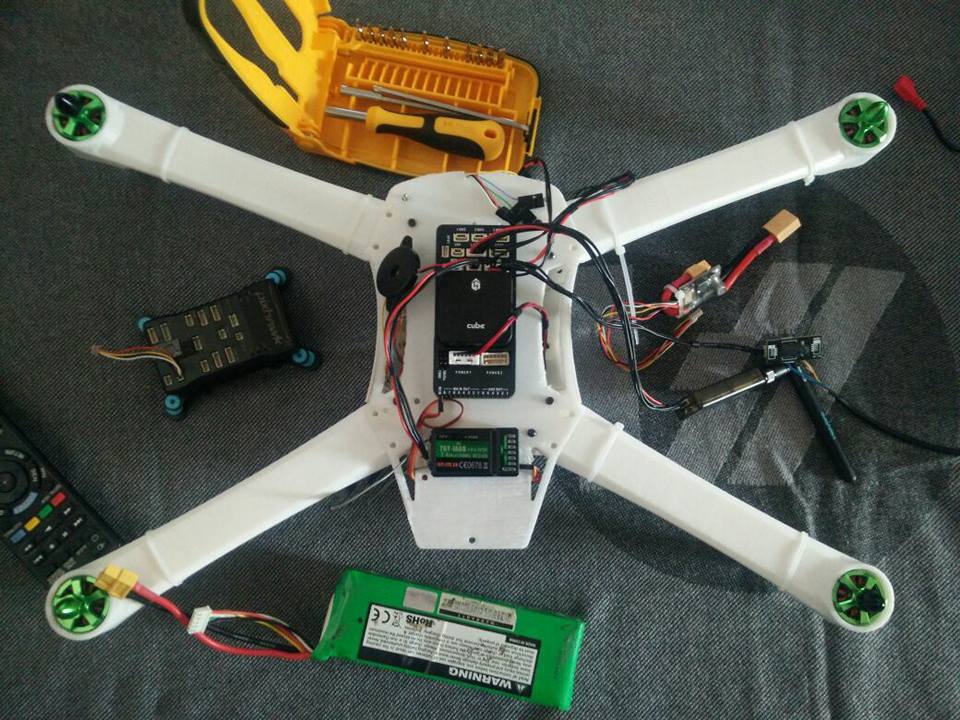
Contrôleur de vol modulaire
Conception cubique modulaire pour la simplicité. Toutes les entrées sorties se trouve sur un seul connecteur DF17. Il est possble d’utiliser différentes « carrier boards » pour des applications spécifiques. Ou concevez aisément vous même votre « carrier board ».
Il est important d’utiliser le dernier firmware (APM:Plane, APM:Copter, etc) Et d’utiliser la dernière version de Mission Planner.
Quand vous connectez le Pixhawk 2 à Mission Planner pour la première fois, il est important de mettre le paramètre « AHRS_ORIENTATION » à « 0 ». Cela permet de corriger l’horizon.
La redondance des capteurs apporte uniquement de la redondance et n’améliorera pas la précision des mesures, les capteurs étant les mêmes.
Si vous connectez des périphériques en USB, il faudra les alimenter séparément. C’est une protection pas un erreur de conception.
Le sortie SBUS d’un récepteur se branche sur l’entrée RC IN
Il est possible de connecter un Intel Edison mais ce n’est pas indispensable.
L’Edison n’a rien à voir avec le RTK Pour le RTK il suffit de brancher un GPS Ublox M8P, les données de correction sont transféré en télémétrie par Mavlink. C’est apparement prêt à l’emploi (plug and play).
Avec sa « carrier board » pèse 74g
Le Pixhawk 2 et sa « carrier board » pèse 74 grammes
Il est possible d’utiliser un module d’alimentation du 1 sur le 2 mais il faut modifier le câble.
Tous les Pixhawk 2 vendus contribue à financer l’équipe de développeurs.
Le Pixhawk peut être fabriqué par plusieurs entreprises, chacune d’entre elles devra répondre à des critères de test et de contrôle qualité.
De grandes choses sont prévues prochainement concernant le retour vidéo et l’évitement d’obstacles.
2 option pour le GPS : le classique Ublox M8N et le M8P pour le RTK.
Le nouveau GPS est un peu plus large que le LEA6H de chez 3DR, il fait 6cm de diamètre.
En vous abonnant à notre newsletter, vous serez les premiers informés des dernières innovations technologiques, des offres exclusives et des événements à venir.
Nous utilisons des cookies pour vous garantir la meilleure expérience sur notre site web et mesurer notre audience.