Escadrone est une SAS créée en 2014 qui a pour vocation de proposer une offre complète de solutions sur le domaine des drones et outils de mesures associés auprès des entreprises et institutions.
Escadrone propose différents produits et services liés à la robotique autonome.
Suite aux interrogations que vous avez sur les précisions des produits drones aériens proposant des capteurs pour la photogrammétrie et des GPS permettant des corrections centimétriques, nous avons ici comparé les deux produits leader en RTK PPK sur ce segment.
Cette étude fournit les résultats et compare deux produits leader sur le marché dont Escadrone a en charge la distribution sur le marché Français :
Le multirotor phantom 4 RTK de DJI et l’aile UX11 PPK de Delair.
Ces deux outils RTK PPK à destination des topographes, géomètres ou plus généralement toutes entreprises souhaitant numériser et modéliser un environnement, ont des caractéristiques différentes que nous allons exposer dans la suite de cette étude.


Nous avions publié un article permettant de bien comprendre comment ces deux systèmes d’augmentations de précision fonctionnent. Retrouvez toutes les infos ici
Le nouveau drone de DJI Phantom 4 RTK propose comme « son grand frère » le matrice 210 RTK V2 différents modes de fonctionnement que nous décrivons ici
Vidéo du drone en vol avec décollage et atterrissage
Présentation vidéo de l’application de vol
Présentation vidéo de l’application pour le post process des données GPS, Delair after flight
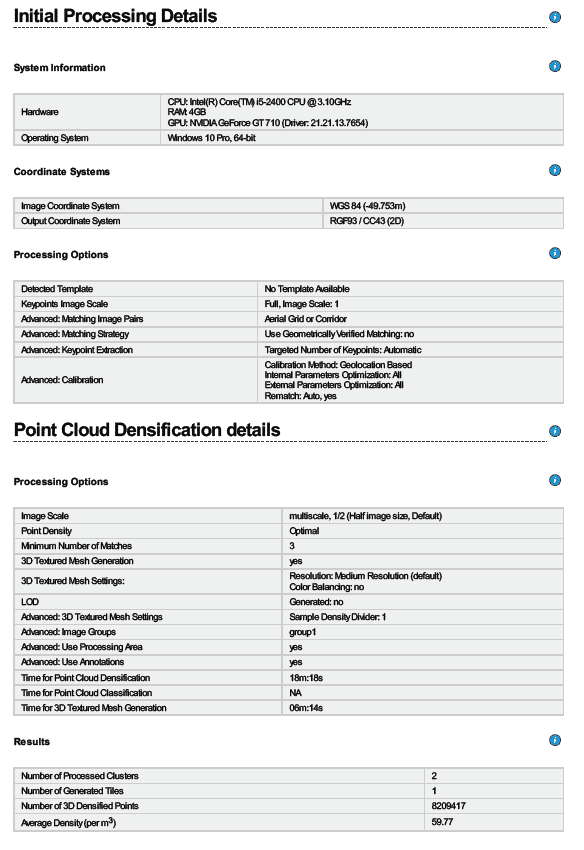
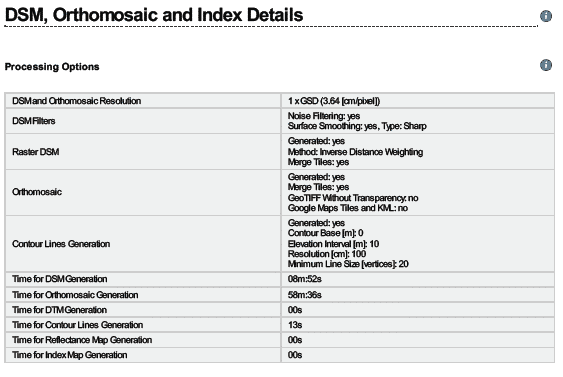
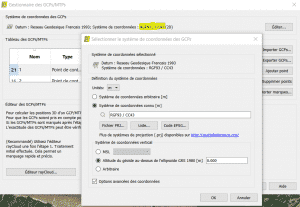
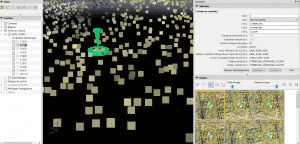
Nous avons ici utilisé le logiciel Pix4D pour assembler les données.
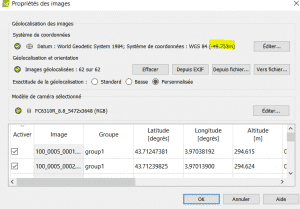
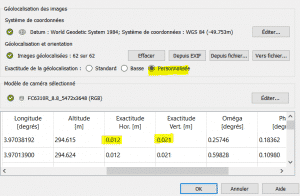
Capture des réglages utilisés sur pix4d :
Rappel sur les altitudes et pensez à la grille RAF
Différence point calage (GCP3d) et point de control « checkpoint » :
Un point de calage « GCP » sert dans le calcul d’aero-triangulation et permet à la fois d’améliorer la précision relative du modèle mais aussi la précision interne par optimisation du calcul initial.
Un point de control « checkpoint » sert uniquement à contrôler la qualité de la précision, en effet il n’est pas utilisé dans le calcul.

Condition de vol : difficile, vent fort
Condition de levé des GCPs : difficile, perte de connexion
Taille des cibles 50cm de coté
Matériel GPS pour le levée des cibles : Stonex S900 + Orpheon
GCP en cc45/IGN69
Grilles Raf : 45.841m
Lien vers les GCP : https://drive.google.com/open?id=1H86J_bDT50Q83EPBmh3M0yu3EWfQltk4
Lien vers le datasets : https://drive.google.com/open?id=159FS_r_R8s_6T4zsSJw9MC9BL4lqWqr6
Lien vers les exports cités ci-dessous : https://drive.google.com/open?id=1sJKDS1reZ1sdLnIExjSMBUmNLvXSAYCN

Ce produit est idéal pour la cartographie de grandes superficies ou linéaires. Le format aile proposé par Delair et distribué par Escadrone permet facilement d’acquérir entre 20 et 200Ha par vol.
Le Gps corrigé en PPK apporte une réelle amélioration de position des clichés, il permet en outre de fonctionner dans les endroits où le réseau ne passe pas. Il est aussi fort utile pour le vol hors vue car il n’est pas nécessaire de maintenir un lien avec la base gps comme pour le RTK.
Ce produit permet aussi le vol S4, cela ouvre la porte au mapping de corridor de longue distance. Escadrone propose des formations S4, contactez nous au 04 58 00 54 10 pour plus d’informations.
Notre étude met en valeur une précision sans aucun GCP de l’ordre de 10cm sur l’orthophoto et une très bonne précision avec uniquement 3 point de calage !
Ainsi avec un temps de pose de cible court sur 3 points on obtient des résultats proches du 1 cm de précision en planimétrie !
D’autre part la qualité de l’orthophoto à 120m est de 1.4 cm/px, cela permet une très bonne visualisation des détails.

Condition de vol : difficile, vent fort
Condition de levé des GCPs : difficile, perte de connexion
Taille des cibles 50cm de coté
Matériel GPS pour le levée des cibles : Stonex S900 + Orpheon
GCP en cc45/IGN69
Grilles Raf : 45.841m
Lien vers les GCP : https://drive.google.com/open?id=1msg-NR4-RQ0PI4MUd1IY4qoixUnObOrC
Lien vers le datasets : https://drive.google.com/open?id=1mY127N0JVyT9lu_jezreqQU5Ci7agPzL
Lien vers les exports cités ci-dessous :
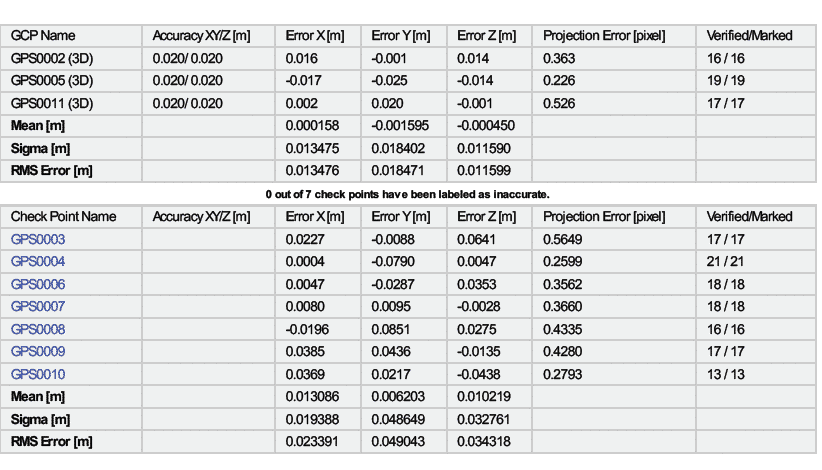
L’erreur moyenne de position en x,y,z est de 3 cm
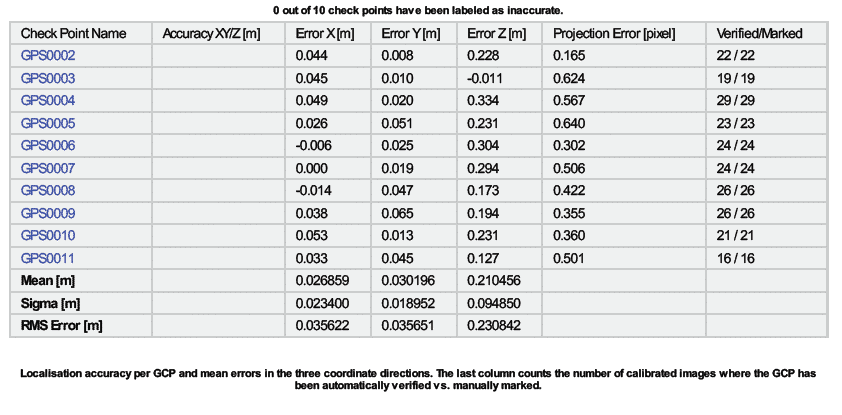
Assemblage sans GCP : on a en moyenne 3.5 cm en X, Y et 2 cm en Z de précision
On note ici que pix4d fait le choix d’écarter les 3 cibles les plus mauvaises pour lui, ce qui est en faveur d’une bonne précision annoncée, ces cibles sont bien présentes dans le modèle et ont été levés de la même manière que les autres.
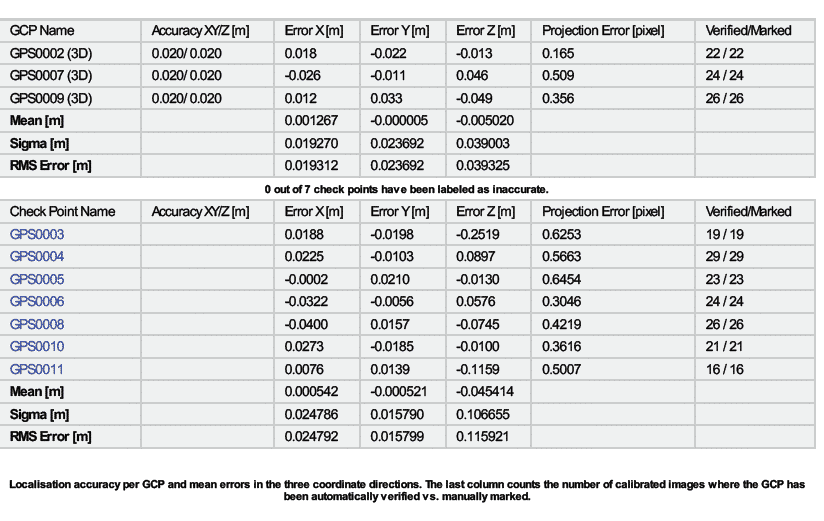
Assemblage avec 3 GCP : on a en moyenne 2.5 cm en x, 1.5cm en Y et 1 cm en Z de précision.

Le DJI phantom 4 RTK se distingue par sa simplicité de mise en œuvre, qu’il soit en RTK avec sa base ou directement relié en GSM à un réseau de correction RTK, le décollage et atterrissage vertical font de ce modèle le « 4×4 » du drone.
Dans cet exemple à 120m on voit les limites du produit sur la qualité de l’othophoto, nous conseillons de l’utiliser jusque maximum 80m, ce qui en fait un outil très intéressant pour des surfaces jusqu’à 40ha.
Notre étude met en valeur une précision sans aucun GCP de l’ordre de 10cm sur l’orthophoto et une très bonne précision avec uniquement 3 point de calage !
Ainsi avec un temps de pose de cible court sur 3 points on obtient des résultats proches du 1 cm de précision en planimétrie !








