L’objectif des informations qui vont suivre vise à vous sensibiliser sur la technicité opérée par le fabricant DEEP TREKKER dans la construction d’un ROV.
Vous comprendrez ici pourquoi les ROVs DEEP TREKKER distribués en France par Escadrone, sont aujourd’hui les véhicules télécommandés sous-marins les plus fiables et les plus innovants du marché.
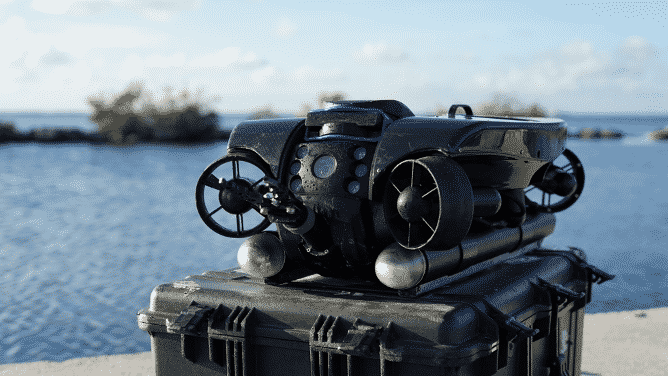
Les propulseurs installés sur les ROVs DEEP TREKKER bénéficient d’une conception innovante appelée « couplage magnétique ».
La transmission du moteur d’entraînement à l’hélices est ainsi faite à l’aide d’aimants qui confèrent aux propulseurs une durabilité extrême sans détérioration prématurée.
Les propulseurs ne nécessitent aucun entretien continu contrairement à d’autres propulseurs qui demandent souvent d’être huilés ou graissés ou d’être purement remplacés régulièrement.
Le couplage magnétique offre un transfert de couple sans contact en utilisant un champ magnétique plutôt qu’une connexion mécanique physique. L’accouplement magnétique offre aux pilotes de DEEP TREKKER un véhicule pratique nécessitant peu d’entretien. Comme les deux surfaces ne glissent pas l’une contre l’autre, il n’est pas nécessaire de les remplacer ou de les réaligner. En outre, l’entretien est vraiment facile car les systèmes n’ont pas besoin d’être graissés, huilés ou remplis d’azote. Le plus important est peut-être que les aimants ne s’usent pas au fil du temps. Nos robots durent donc plus longtemps que les autres modèles ce qui vous donne un robot sur lequel vous pouvez compter à chaque fois que vous le sollicitez pour une mission.

Les ROV submersibles peuvent être fabriqués à partir d’une variété de matériaux tels que le plastique, le titane, l’acier inoxydable et l’aluminium. Du transport et de la manutention aux collisions sous-marines, un ROV doit résister à des environnements difficiles. Les matériaux des ROV doivent également être légers afin de maintenir une flottabilité neutre pour faciliter la navigation et optimiser l’utilisation de l’énergie. Il est impératif que les petits ROV, comme les véhicules de DEEP TREKKER, aient une flottabilité neutre. Les métaux et les matériaux plus lourds font couler le ROV, ce qui l’oblige à travailler davantage pour maintenir une flottabilité neutre et rend la navigation plus difficile. Avec l’aluminium et la fibre de carbone, les ROV de DEEP TREKKER ont une flottabilité neutre par eux-mêmes, sans avoir à gaspiller la batterie. Bien que légers, l’aluminium et la fibre de carbone sont durables. Les ROV submersibles sont confrontés à des conditions difficiles et effectuent des tâches difficiles, c’est pourquoi l’utilisation de l’aluminium et de la fibre de carbone permet de trouver un équilibre entre légèreté et robustesse.
existe de nombreux types d’engrenages utilisés dans les systèmes robotiques. Les différents matériaux des engrenages présentent de nombreux avantages et inconvénients. Les rayons en alliage d’acier sont durables, ce qui est impératif dans la construction des ROV. Particulièrement utiles pour les systèmes à déplacement rapide, les engrenages en alliage d’acier offrent à l’équipe de DEEP TREKKER la durabilité et la robustesse nécessaires à la construction de ROV de premier ordre.
En utilisant des champs magnétiques, les capteurs à effet Hall sont utilisés pour détecter des variables telles que la proximité, la vitesse ou le déplacement d’un système mécanique. Les véhicules DEEP TREKKER utilisent l’effet Hall car leur petite taille permet d’intégrer facilement les capteurs dans le véhicule pour fournir des informations précises.
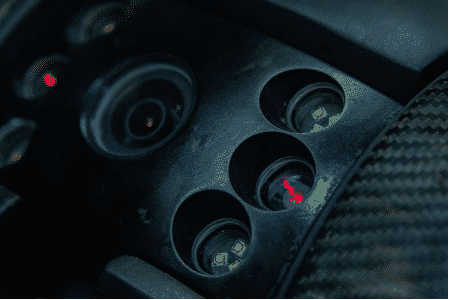
Le couvre-objectif d’un ROV est crucial pour le fonctionnement global du véhicule. Comme un véhicule submersible permet aux utilisateurs d’avoir des yeux sous l’eau, un couvre-objectif efficace est une nécessité absolue. L’acrylique et le saphir sont les matériaux idéaux pour les véhicules DEEP TREKKER. Offrant un équilibre parfait entre clarté et durabilité, notre couvre-lentille peut résister aux rigueurs du travail sous-marin tout en offrant une vue claire.
La latence est un délai entre l’entrée de la commande et son exécution par le robot. La latence peut également faire référence à un délai entre le retour d’information de la caméra ou du capteur sur le véhicule et l’affichage du contrôleur. La latence a un impact considérable sur les opérations des ROVs. Le contrôle et la navigation deviennent incroyablement difficiles, ce qui rend les tâches précises et techniques fastidieuses. La technologie BRIDGE est un système d’exploitation conçu pour créer une expérience de latence quasi nulle. Les contrôleurs qui s’appuient sur une connexion bluetooth et/ou wifi à un appareil mobile créent par nature une latence qui rend le contrôle difficile et frustrant. BRIDGE améliore les capacités d’exploitation avec une plateforme technologique transparente pour les robots sous-marins Deep Trekker DTG3, REVOLUTION et PIVOT. Des algorithmes avancés permettent une réponse transparente entre le contrôleur et le véhicule, tandis que la plateforme d’intelligence améliorée a la capacité de s’intégrer aux intégrations tierces actuelles et futures.

Au fur et à mesure que l’espace de la technologie sous-marine progresse, avec l’apparition de nouveaux capteurs et accessoires innovants, il est devenu essentiel d’utiliser des interfaces et des protocoles de communication standardisés et couramment utilisés. En utilisant les mêmes interfaces que de nombreux outils et intégrations tiers, la communication est transparente et directe. La technologie BRIDGE de Deep Trekker a été l’une des premières à adopter la topologie de réseau IP, en utilisant l’interface Ethernet établie. Cette capacité a permis d’intégrer de nombreuses technologies de pointe telles que les sonars, les DVL et les caméras
Le nombre de configurations de propulseurs sur un ROV est illimité, tant en nombre de propulseurs qu’en disposition sur le véhicule. Deep Trekker a adopté l’approche de deux configurations principales, pour mieux répondre aux différents besoins des applications des clients. Le DTG3 utilise seulement deux propulseurs et un mécanisme de tangage breveté. Cette configuration fournit une plate-forme extrêmement agile, avec l’avantage supplémentaire d’un facteur de forme compact et d’une grande fiabilité grâce à un nombre réduit de pièces mobiles. La REVOLUTION cible les applications qui nécessitent une plateforme très stable, capable d’une maniabilité accrue. Pour y parvenir, une configuration à six propulseurs a été adoptée, permettant un contrôle latéral total sans compromettre la stabilité.
Depuis 2014, Escadrone accompagne ses clients dans l’intégration de la robotique autonome pour des usages civils professionnels.
Pionnière dans la conception, la vente, l’homologation de drones et la formation à ses usages et métiers, elle se positionne comme experte de son domaine et connaît parfaitement tous les acteurs et les produits du marché.
Escadrone vous supporte sur l’ensemble de la chaîne de valeurs depuis la formation à vos outils de collecte d’informations jusqu’au traitement et l’interprétation de vos données.

















