Le LIDAR (Light Detection And Ranging) aussi appelé « radar laser » en français est un système de mesure par télémétrie laser permettant de cartographier ou plutôt représenter des zones au travers d’un nuage de points dense.
Escadrone saura vous conseiller sur l’achat d’un LIDAR pour drone en fonction de vos enjeux et de vos projets. Nous proposons une gamme de drones homologués permettant d’emporter chacun les LIDARs dans les différents scénarios de vols français.
N’hésitez pas à nous contacter directement pour échanger sur votre projet et les solutions Drone + LiDAR embarqué.
Un LiDAR sur drone, c’est un outil qui émet des lasers (faisceaux de lumière très concentrés) dans différentes directions autour de lui pour mesurer des distances par télémétrie. La distance de chaque laser envoyé sur les objets et obstacles qui l’entourent est ensuite couplé avec l’orientation et l’orientation du LiDAR pour pouvoir positionner chaque point relevé dans un espace en 3 dimensions. Comme le LiDAR est capable d’envoyer un grand nombre de faisceaux laser par seconde, celui-ci créé un nuage de points 3D dense très rapidement.
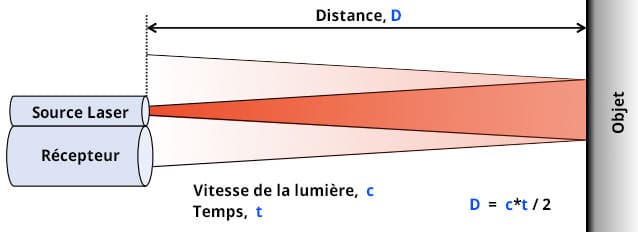
Le LiDAR utilise le principe de télédétection laser par télémétrie. Il envoie une impulsion de lumière et mesure le temps que cette impulsion a mis pour revenir jusqu’au récepteur. En connaissant la vitesse de la lumière, le système peut ainsi calculer la distance parcourue par la lumière avant de heurter un (ou plusieurs) objets successivement. Seul une infime partie de l’énergie émise a besoin d’être récupérée par le récepteur pour réaliser ces calculs.
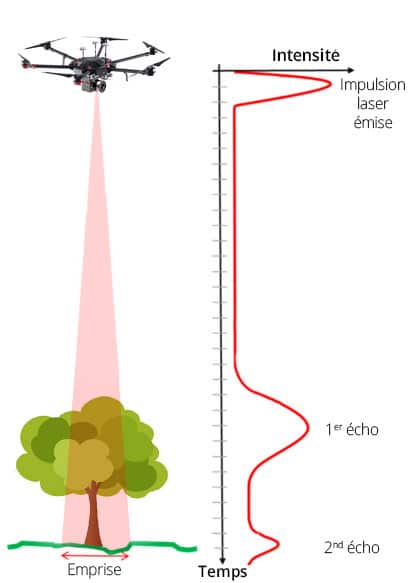
Les impulsions laser émises par un système LiDAR se réverbèrent sur les différentes surfaces : végétation, constructions, peintures, etc. Une impulsion laser envoyée est capable de revenir sur le LiDAR suite à plusieurs retours que l’on appelle alors échos. Ainsi toute impulsion laser émise qui rencontre de multiples surfaces de réflexion lorsqu’elle se déplace, est divisée en autant d’échos qu’il y a de surfaces réfléchissantes.
La première impulsion laser renvoyée est l’écho le plus significatif et souvent le plus fort et sera associée au point le plus élevée du paysage, par exemple : le sommet d’un arbre ou d’un immeuble. Ce premier écho peut également représenter directement le sol, auquel cas un seul retour sera détecté par le système lidar puisque le faisceau ne pénètrera pas plus loin dans des surfaces denses et solides comme du béton.
Les échos multiples sont capables de signaler l’élévations de plusieurs objets dans l’empreinte d’une seule impulsion laser sortante. Les échos intermédiaires sont en général utilisés pour caractériser la structure de la végétation, et le dernier écho pour les modèles de terrain dénudés. Le nombre d’échos que le LiDAR peut recueillir va dépendre de la puissance du signal du système utilisé, certains capteurs ne vont renvoyer que 2 échos, et d’autres jusqu’à 5 et plus.
Le dernier écho ne définira pas toujours le sol. Car lorsque par exemple une impulsion frappe une branche épaisse sur son chemin vers le sol et que le faisceau n’atteint pas réellement le sol, le dernier écho ne provient pas du sol mais de la branche qui reflète l’impulsion laser entièrement : d’ou l’intérêt d’avoir un LiDAR qui émet plusieurs centaines de milliers de points à la seconde.
Un LiDAR est composé de 4 éléments principaux :
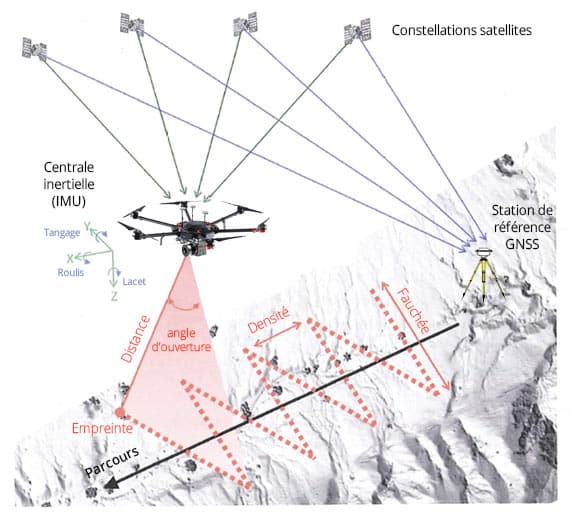
L’intérêt du relevé lasergrammétrique est de réaliser directement de la mesure :
L’agrégation de ces trois éléments fait que l’on est capable de maîtriser dans une certaine mesure la précision du relevé.
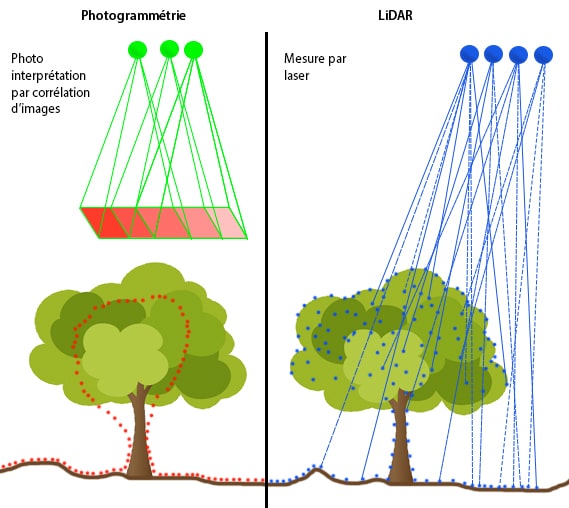
A l’inverse, la photogrammétrie est une technique de mesure par interprétation ; un ensemble d’images est analysé informatiquement pour repérer des points de concordances entre les images et positionner ces points dans l’espace en prenant compte de différents éléments comme la position et l’orientation des images ainsi que la couleur de chaque pixel.
L’approche est donc bien différente entre d’un côté de la mesure par laser avec le LiDAR et de l’autre de l’interprétation logicielle d’images pour la photogrammétrie.
Chaque LiDAR drone a des caractéristiques internes liées à la puissance des lasers, leur nombre, l’information qu’il récolte ainsi que la centrale inertielle liée et le système de positionnement GNSS associé. Ainsi il n’y a aucune solution qui soit adaptée à toutes les situations, il faudra donc analyser les enjeux de vos projets afin de déterminer quel est l’outil le plus pertinent.
Escadrone, de part son rôle de distributeur de solutions, a pour mission de vous aider à cadrer votre besoin et cibler le LiDAR adéquat.
En général nous demandons à nos prospects de nous dire :
A l’heure actuelle les LiDARs apportent énormément d’avantages au milieu de la cartographie et des relevés de précision et notamment en zones boisées, néanmoins même les LiDARs ont des limites.
Depuis 2014, Escadrone accompagne ses clients dans l’intégration de la robotique autonome pour des usages civils professionnels.
Pionnière dans la conception, la vente, l’homologation de drones et la formation à ses usages et métiers, elle se positionne comme experte de son domaine et connaît parfaitement tous les acteurs et les produits du marché.
Escadrone vous supporte sur l’ensemble de la chaîne de valeurs depuis la formation à vos outils de collecte d’informations jusqu’au traitement et l’interprétation de vos données.