La plateforme de vol se choisit en fonction de vos besoins en terme d’autonomie, redondance, tenue au vent, encombrement, scénario de vol et emport de charge.
Cette plateforme de vol contient différents éléments dont le plus important est le contrôleur de vol ou autopilote, c’est la carte mère, le cerveau. L’autopilote contient le code qui fait voler la machine, c’est l’OS au même titre que Windows sur un pc, la matière grise.
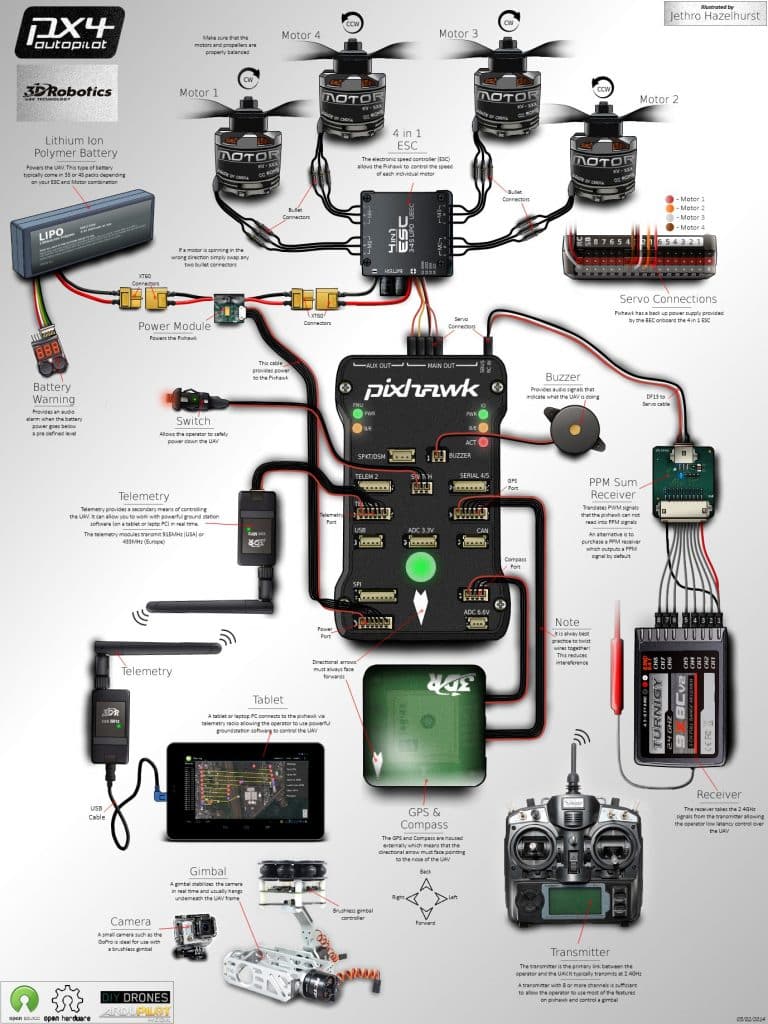
Infographie des différents éléments d’un drone.
Tous les drones que nous proposons sont équipés du contrôleur de vol PIXHAWK, issu d’un développement open hardware.
Le code qui fonctionne sur les PIXHAWK que nous utilisons est le code APM Copter. Ce code est développé par la fondation Linux (APM Copter est en cours de changement de nom et s’appellera DroneCode).
Le développement est open source, il est financé et soutenu par de nombreuses entreprises mondialement reconnues qui ont des intérêts dans la revente de produits issus du développement de ce code.
Vous trouverez sur ce lien le wiki associé au projet, et sur ce lien le forum de la communauté.

En cas de batterie faible, le drone rentre automatiquement et atterrit à son point de décollage.
En cas de coupure de la liaison avec votre radio commande, le drone rentre automatiquement et atterrit à son point de décollage.
En cas de coupure de la liaison avec votre station de contrôle, le drone rentre automatiquement et atterrit à son point de décollage.
Si le drone sort d’un volume que vous définissez, la barrière virtuelle, le drone rentre automatiquement et atterrit à son point de décollage.
L’autopilote effectue une check liste interne avant le décollage, si une valeur n’est pas conforme, vous ne pourrez pas décoller.
Vous pouvez à tout moment activer le retour automatique, le drone retourne et atterrit à son point de décollage de manière autonome.
Un bouton de sécurité permet d’activer et désactiver le drone.
Le démarrage des hélices se fait à distance.
En cas de perte du signal GPS le drone se met en sécurité.
APM copter propose de nombreuses fonctionnalités : Follow Me, décollages et atterrissages automatiques, planification de missions personnalisées avec points de navigation GPS, vol stationnaire ultra précis, retour au point de départ autonome, mode guidé et beaucoup d’autres.
La charge embarqué comprend la nacelle ainsi que le capteur.
Elle peut être fixe, a servo ou à moteur brushless, sur deux axes ou trois axes.
Selon votre applicatif vous aurez besoin d’une caméra, un appareil photo, une camera infrarouge, une caméra multispectrale ou encore un LIDAR.
Dans le choix du capteur, il faut garder en mémoire que son poids impactera sur l’autonomie de la machine.
La station de contrôle au sol permet de suivre les valeurs du drone pendant le vol mais aussi et surtout à programmer les missions automatiques.
Sur la vidéo ci dessous vous pouvez voir l’utilisation de mission planner dans le cadre de la réalisation d’une mission de photogrammétrie :
| Logiciel | MAVLink Protocol | Destination | Compatible |
| QGroundControl | Oui | Débutants et avancés, Développeurs | Win, Mac, Linux |
| Mission planner | Oui | Débutants et avancés, Développeurs | Win |
| APM Planner | Oui | Débutants et avancés, Développeurs | Win, Linux, OS X |
| MavProxy | Oui | Avancés, Développeurs | Win, Linux, OS X, Android |
| Droidplanner | Oui | Mobile/tablette Débutants et avancés, Développeurs | Android |
| AndroPilot | Oui | Mobile/tablette Débutants et avancés, Développeurs | Android |
| UgCS | Oui | Débutants et avancés, Développeurs | Win, Linux, OSX, Android (PV+ app) |
| Drone Deploy | Oui | Mobile/tablette Débutants et avancés, Développeurs | Web UI |
Affiché sur un écran au sol, il permet de visualiser en direct ce que voit l’appareil photo.
Elle permet le contrôle du drone en mode manuel, c’est aussi avec celle ci que l’on pourra piloter le capteur.









