Vous trouverez ci dessous les réponses à toutes les questions que vous avez sur le fonctionnement d’un système GNSS ! Qu’est ce que c’est ? Comment cela fonctionne ? Quelle précision ? Comment on améliore la position, qu’est ce que le SBAS, le RTK, le PPK! Quelle influence a la précision du récepteur en photogrammétrie? Comment fonctionne le Delair UX11, le DJI P4R!
Un système GNSS (pour Global Navigation Satellite System) est un ensemble comprenant un récepteur et une constellation de satellites permettant de situer un utilisateur.
Parmi les constellations les plus développées :
Par abus de langage on parle de GPS alors que l’on devrait parler de GNSS.
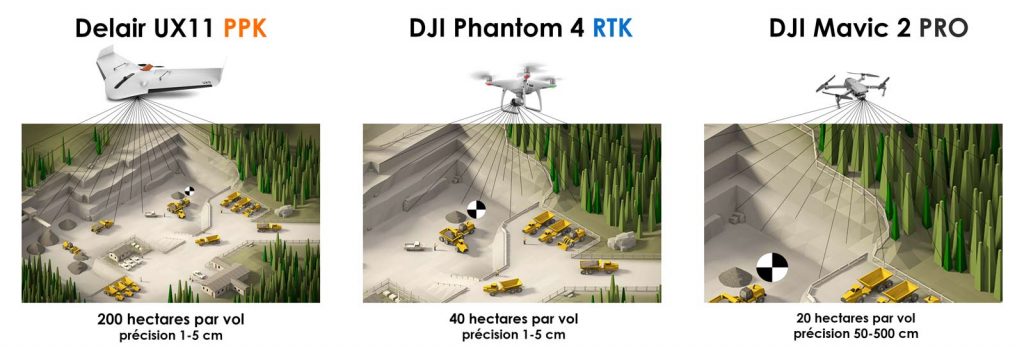
Ces trois outils contiennent tous des GPS (récepteurs GNSS) de plus ou moins grande précision



Les satellites émettent plusieurs signaux de fréquences différentes observables par les récepteurs, on parle de phase. Par exemple L1 et L2 ou L5 pour les satellites de la constellation GPS
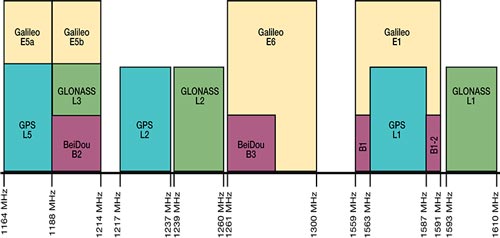
Le récepteur reçoit les informations contenues dans ces signaux, par exemple un récepteur GPS/Glonass – L1 observe une phase sur la constellation GPS et une phase sur la constellation Glonass. On parle d’observation pour les données observées par le récepteur.
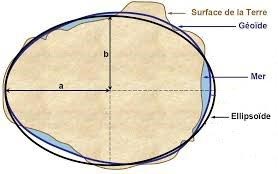
Le système de satellite permet au récepteur de connaitre ses coordonnées géographiques en trois dimensions : longitude, latitude et sa hauteur par rapport à l’ellipsoïde. Le récepteur détermine aussi sa vitesse et la date et heure.
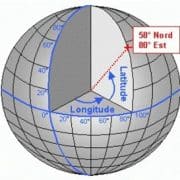
La latitude est à 0° à l’équateur, la longitude est à 0° au méridien de Greenwich.
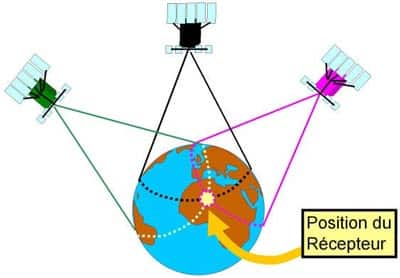
Le récepteur calcule sa distance au satellite grâce à l’heure, la position et la trajectoire du satellite ; et par trilatération obtient sa position. Trois satellites minimum seraient nécessaires à l’obtention d’une position.
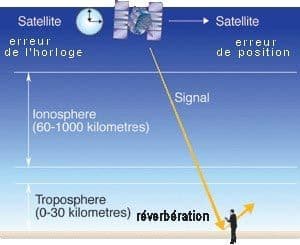
Ce calcul de positon est peu précis car possède des erreurs liées à l’environnement et la qualité des composants.
En effet le signal ralentit et accélère, en fonction de la densité des éléments traversés, qui varie en fonction de la composition de la ionosphère et de la troposphère.
De plus il existe aussi une erreur sur la position du satellite et la précision des horloges atomiques des satellites.
La précision du positionnement obtenue est de l’ordre de la centaine de mètres.
Il existe heureusement plusieurs moyens de corriger cette précision, la principale étant d’utiliser un quatrième satellite pour déterminer le décalage entre les horloges atomiques donc l’erreur de position des trois satellites utilisés pour déterminer la position du récepteur. Cette amélioration est tellement nécessaire que ce quatrième satellite est à minima requis pour obtenir une position.
Un second moyen vient se coupler sur tous les récepteurs modernes, c’est le multi-constellation. En effet les récepteurs vont travailler avec plusieurs constellations en même temps pour moyenner les positions. Par exemple, un récepteur va calculer des positions issues du GPS et de GLONASS en même temps, puis moyenner les deux positions.
Un troisième levier peut s’ajouter aux deux précédents c’est le fait d’observer, grâce à un récepteur dimensionné pour, plusieurs phases. L’erreur de position est moyennée, en sus du multi constellation, sur plusieurs fréquences observées (par exemple L1 et L2)
On arrive ainsi à une position avec une précision de l’ordre de la dizaine de mètres !
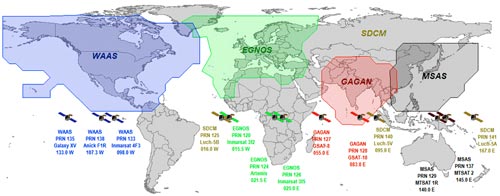
Le SBAS est un système qui utilise des satellites pour transmettre la correction aux récepteurs « rover ». Ainsi plusieurs bases appartenant à différentes organisations gouvernementales envoient des corrections.
Par exemple en Europe, les récepteurs (Rover) compatible EGNOS reçoivent ces infos de correction via 3 satellites dédiés et ces informations sont issues d’un maillage de base s’environ 300km de côté.
On obtient ainsi des précisions de l’ordre du mètre !!
On entre donc dans ce que l’on appelle le système d’augmentation de la précision !
Pour cette amélioration, une seule méthode, la méthode différentielle. On parle de SBAS, de correction RTK ou encore de correction PPK.
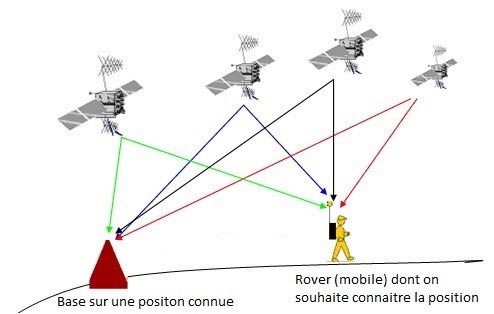
Le principe de la méthode différentielle est de corriger la position (longitude, latitude, hauteur) du rover ou mobile (dans notre cas le drone) à partir d’une erreur calculée à partir d’un point connu.
(Delta X, Delta Y , Detla Z) = (xB, yB , zB) – (xo, yo , zo)
Position « vérité » du rover = (xr, yr , zr) – (Delta X, Delta Y , Detla Z)
La précision ainsi obtenue grâce à cette amélioration est fonction de la distance entre la base et le rover. En effet plus la correction est obtenue sur une base proche du rover, plus l’erreur trouvée est proche de la vérité car proche de l’environnement extérieur du rover.
Pour réaliser cette correction différentielle, il faut un moyen de transmission de cette erreur (Delta X, Delta Y , Detla Z) au rover : ces données peuvent être transmise via satellite, 4G/3G ou radio.
Le RTK est un système d’augmentation spatial différentiel qui se base sur une base très proche du rover. Deux types de bases peuvent être utilisées :
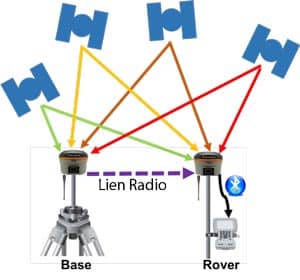
Cette base est placée par l’utilisateur sur un point connu, elle envoi par lien radio les corrections au rover. L’intérêt est d’avoir une base très proche du rover (quelques mètres) donc une erreur au plus proche de la vérité. L’inconvénient est qu’il faut pouvoir connaitre très précisément le point sur lequel on met la base, ce point peut être amené à l’aide d’une station totale (=théodolite + nivelle laser) par exemple.
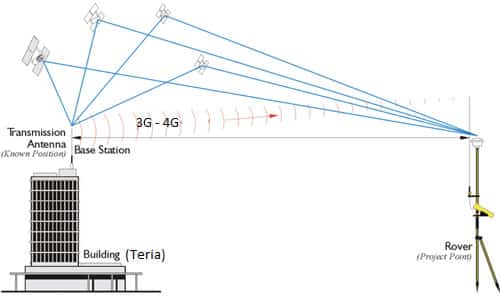
Teria ou Orphéon par exemple en France. Dans ce cas le maillage est inférieur à 100km, le rover communique avec la base la plus proche via 3G/4G et récupère les corrections.
Cette solution a pour avantage la simplicité d’utilisation et possède une très bonne précision. L’inconvénient est qu’il est nécessaire de capter le réseau et de prendre un abonnement 3G-4G. Il faut aussi ajouter le cout lié à l’abonnement aux serveurs (Teria ou Orpheon) qui diffuse les corrections.
Ça y est on approche le centimètre de précision !!
Le principe est le même pour le RTK mais la donnée de correction n’est pas transmise en direct, elle est stockée dans un fichier au format Rinex sur la base.
Des outils comme le logiciel Delair After Flight ou RTK lib permettent ensuite d’appliquer après le vol les corrections aux positions enregistrées par le rover, on parle de Post Process Kinematic : PPK.
Teria, Oprheon ou encore l’IGN proposent des fichiers Rinex liés a leurs bases.
L’avantage est la gratuité des données pour l’IGN, ou encore la non nécessité de connexion 3G-4G.
Méthodologie pour l’aile Delair UX11 PPK
Les coordonnées d’un positionnement sont valables dans un référentiel.
Par exemple on peut dire que ma tasse de café sur le bureau est à 15 cm du bord gauche et 30 cm du fond, on est a des cordonnées (15 ;30) qui sont dans le référentiel « mon bureau ».
Un système géodésique, définit entre autre quelles sont les unités et le référentiel.
On a vu que le système GNSS fournit des coordonnées de positionnement la surface de la terre, il est nécessaire pour représenter cela sur un plan de faire une projection cartographique.
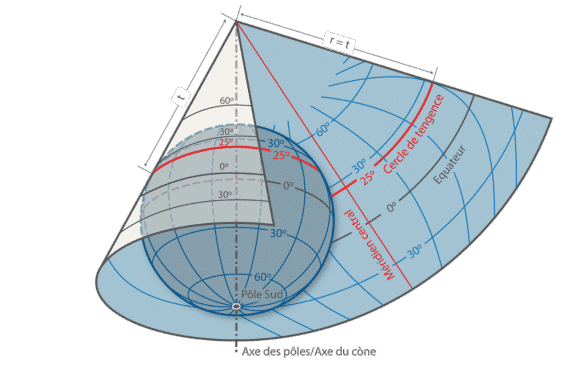
On passe ainsi de coordonnée en angulaire (longitude, latitude) en cordonnées métriques (X,Y).
Cette projection globale génère des incertitudes au niveau local, chaque état possède donc son système de projection, qui peut être sous divisé par zone pour encore améliorer la précision au niveau local.
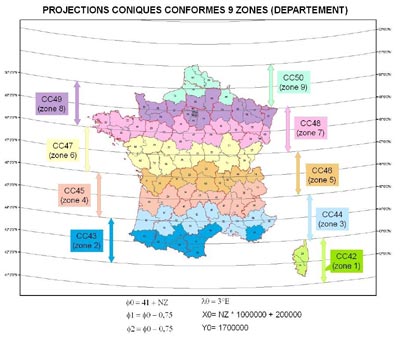
On utilise en France à ce jour les projections coniques conformes « CC » sous divisés par zone.
Ce système a évolué dans le temps, ainsi les projections Lambert étendu, Lambert zone ou encore Lambert 93 ont été utilisé par le passé.
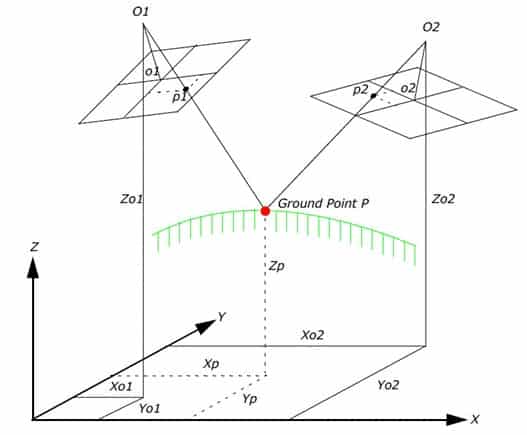
La photogrammétrie permet de reconstituer des surfaces à partir de photographies prises depuis des points de vue différents.
Plusieurs paramètres influent sur la précision du point placé P, dont la qualité de la photo (luminosité, environnement, déformation optique, qualité du capteur…) mais aussi la précision de la position du point o1 ou o2 !
Il est donc très important d’avoir une très bonne précision de la position du cliché, on parle du geotag de la photo.
Sur les drones cette position de photo est calculée à partir du positionnement GNSS.
Sur ce modèle, les données du GPS sont améliorées en post process de façon très simple grâce au logiciel fournit avec le drone Delair After Flight.
Le GPS est très qualitatif car est multiconstelation et bi-phase L1/L2, GPS+GLONASS+SBAS.
Sur ce modèle, les données du GPS sont améliorées en temps réel avec un connexion 4G chez un fournisseur de correction type orphéon ou Teria (abonnement en sus).
Le GPS est très qualitatif car est multiconstelation et bi-phase L1/L2, GPS+GLONASS+SBAS
La canne peut à ce jour (01-12-2018) fonctionner uniquement en base avec le P4R.
C’est-à-dire que l’on la pose sur un point connu, que l’on renseigne sur l’application, la base calcul la correction qu’elle envoie au drone.
A terme DJI prévoit que la canne puisse fonctionner en Rover pour prendre des points de façon indépendant du P4R. Dans ce mode de fonctionnement la canne devient rover et reçoit des corrections de serveur Orphéon ou Teria via 4G (abonnement en sus).
A terme DJI prévoit aussi de pouvoir pose la canne en tant que station de référence « base améliorée » pour streamer des corrections sur un réseaux.


Sources :
https://fr.wikipedia.org/wiki/Cin%C3%A9matique_temps_r%C3%A9el
http://reseau-orpheon.fr/le-principe-de-la-correction-gps-rtk
https://www.reseau-teria.com/
http://www.ign.fr/
https://www.novatel.com/an-introduction-to-gnss/chapter-5-resolving-errors/real-time-kinematic-rtk/
http://www.guide-gnss.net/contenuguide/uploads/2014/01/140408-11H20-AGRIGNSS-Romain-LEGROS-G%C3%A9odata-Diffusion-RTK-R%C3%A9seau-.pdf