Le Matrice 300 RTK, sorti en 2020, est le dernier né de de la gamme Matrice chez DJI. C’est une machine capable de voler sur les différents scénarios français S1, S2 et S3. Le M300 a une autonomie d’environ 43 minutes, ce qui double presque le temps de vol par rapport à d’autres vecteurs.
IP45 et équipé de combo de capteur de détection d’obstacle optique et Infra-Rouge, le Matrice 300 RTK permet d‘évoluer dans des environnements extrêmes et d’appuyer le pilote sur la navigation de la machine. Cette navigation, justement, se fait par l’intermédiaire du Smart Controler Enterprise, avec l’application DJI Pilot qui est installée nativement sur la radiocommande.
On a la possibilité également de piloter en double radio commande, pour avoir un pilote sur le vecteur et un opérateur sur la caméra ou sinon, de pouvoir prendre le relais sur la machine en vol.
Ce matériel est équipé du système RTK, qui va pouvoir fonctionner de deux manières différentes :
Le Matrice 300 RTK est également capable de fonctionner en PPK, en enregistrant les fichiers d’observation sur un Rinex.
Pour vos missions de topographie, le suivi de terrain est disponible en important un fichier MNT, ce qui vous permettra d’adapter votre hauteur de vol en fonction du dénivelé de la zone de vol.
Le Matrice 300 crée également des rapports de qualité après mission, c’est-à-dire vous donner un état des lieux de la qualité de vos photos, savoir si elles sont exploitables dans le cadre de modélisations.
Il y a également tout un aspect état de santé du vecteur et de la caméra : est-ce que j’ai bien mes mises à jour ? Est-ce que mes batteries sont bonnes ? Est-ce que toute la navigabilité globale de la machine n’est pas compromise ? Et est-ce que je peux évoluer en toute sécurité ?
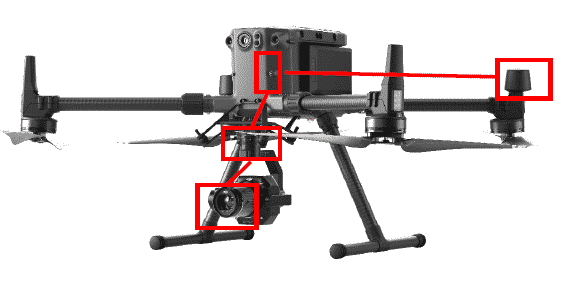
Concernant la caméra P1, il s’agit actuellement du capteur le plus performant de chez DJI en date, puisqu’on retrouve un capteur CMOS plein format 45 Mpx équipé d’un obturateur mécanique.
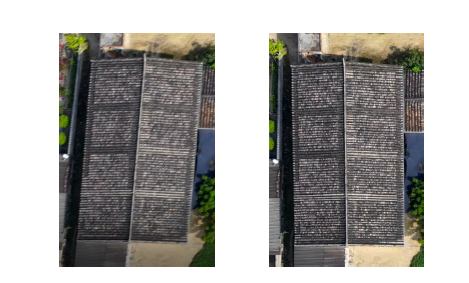
Pour rappel, l’obturateur mécanique permet d’éviter les effets de rolling shutter, de flou sur vos photos liés aux mouvements, contrairement aux obturateurs électroniques qui nécessitent de voler beaucoup plus lentement. On optimise ainsi le temps de vol en prenant plus de photos en un seul vol avec un intervalle de photos très, très serré de 0,7s en vol automatique.
Vous avez à gauche une photo avec un effet de rolling shutter, un effet de flou. On voit bien que la photo est un peu déformée, contrairement à la photo de droite qui a été prise avec un obturateur mécanique.
La P1 va être capable d’embarquer trois focales (attention, les focales de la X7 ne sont pas compatibles). On retrouve trois tailles: 24mm, 35mm et 50 mm. De base, la caméra P1 est livrée avec le 35 mm.
TimeSync 2.0 est une technologie présente chez DJI depuis le Phantom 4 RTK. C’est une technologie qui va “accélérer” tous les éléments du drone pour apporter un géotag au centre du capteur, c’est à dire que la partie GPS, la partie soft du drone, la partie nacelle et la partie capteur, qui vont s’accélérer pour avoir une vérité au moment du clap pour avoir un positionnement exact au centre de la photo. Cela prend en compte le bras de levier du drone.
Cette caméra est aussi intéressante en inspection puisqu’on a un vrai capteur plein format cette fois-ci sur un drone DJI, quelque chose qu’on n’avait pas jusque-là. Pour verifier cela nous avons fait un test sur un mur blanc à 1m, 2m et 3m. Puis nous avons fixé une carte SD sur le mur pour se rendre compte de la qualité de l’autofocus. On note que le focus est bon sur toutes les distances. Et puis, bien entendu, on perd un petit peu en qualité quand on s’éloigne, mais c’est une perte de qualité liée à la distance et pas au focus.





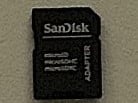
C’est intéressant dans des applicatifs d’inspection, où nous avons parfois des surfaces uniformes ou difficiles et que l’on souhaite un niveau de détail assez fort : c’est possible et l’autofocus fonctionne bien.
Sur la partie reconstitution par photogrammétrie, nous avons fait une orthophoto d’un site avec le Phantom 4 RTK et avec la camera P1 en 35mm pour voir ce que l’on gagne.
Le calcul s’est fait avec Pix4D dans des qualités standards, avec un vol à 50 mètres pour le Phantom 4 et à 60 mètres pour la caméra P1. Dans les deux cas le RTK est actif sur le drone, les corrections viennent du fournisseur Orphéon et nous avions placé des cibles à la fois de calage et de contrôle sur le site.
Les cibles font 50 cm par 50 cm. Nous voyons ci-dessous une cible qui est issue de l’orthophoto réalisée avec le Phantom 4 RTk, et à côté, de celle réalisée avec le capteur P1.
Avec le Phantom 4 RTK, on note sur la précision du nuage de points une précision de l’ordre de 2 à 5 cm, une précision de 2cm sur la partie planimétrie et 5cm sur la partie altimétrie. On est au mieux autour d’1 cm en planimétrie en déployant des moyens standards.


Avec le capteur P1 on obtient une bien meilleure résolution de façon assez normale sur la cible, sachant que le vol est à 60m contre 50m pour le Phantom.

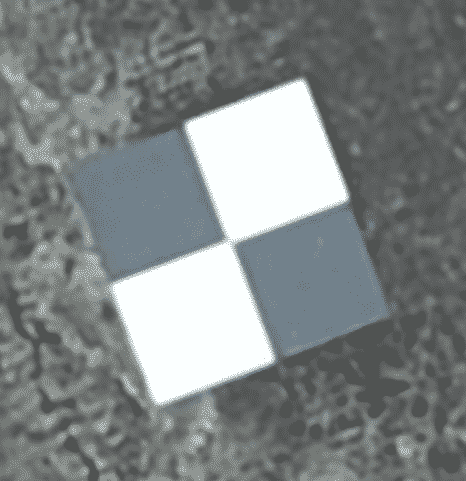
Il y a un vrai gain de qualité sur la résolution des orthophotos, ce qui permet bien entendu d’avoir des éléments beaucoup plus détaillés dans ce qu’on va rechercher.
On note qu’on voit à peine la fissure sur le sol avec le Phantom. Avec la P1, on voit très nettement qu’il y a une fissure sur le sol à gauche et on distingue beaucoup mieux la cible. Ça va aussi aider à avoir des positionnements, des points de calage et de contrôles plus juste quand on les place sur des modèles qui ont cette qualité-là.
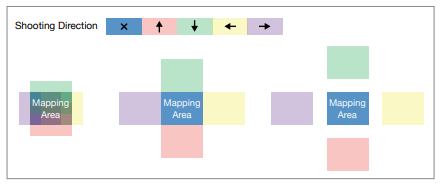
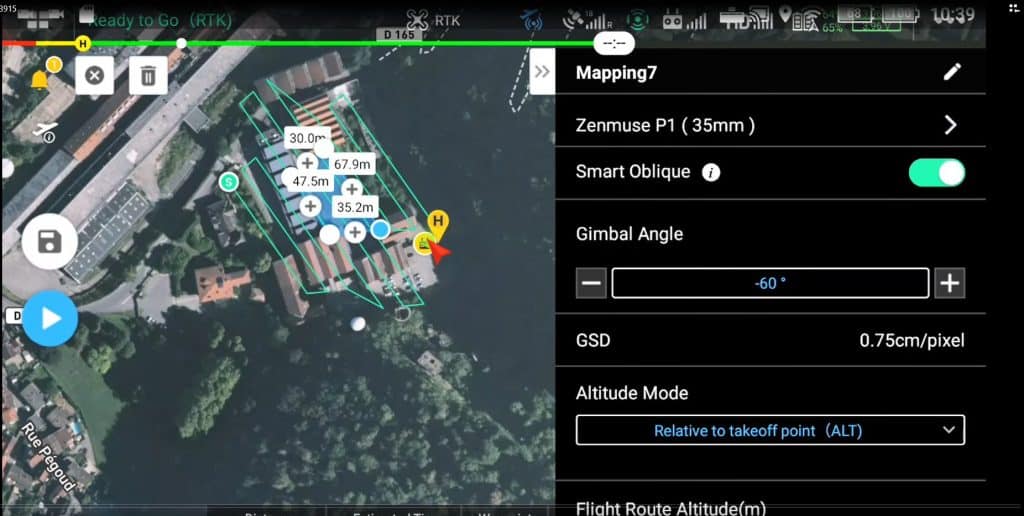
Il existe un mode smart oblique qui est très intéressant sur la caméra P1, pour réaliser des modèles 3D. Ce mode permet d’avoir un positionnement identique sur les 3 axes et aussi de donner de la texture aux surfaces verticales, ce qui est difficile sur les vols en nadir.
Là où sur le Phantom 4 RTK, il est nécessaire de réaliser plusieurs vols. Sur le Matrice 300, le passage est fait en une fois et l’algorithme qui gère ce mode ne prend que les photos intéressantes en fonction de la position du drone et de la zone que l’on souhaite modéliser. Pour se faire, le drone va adapter sa vitesse en fonction du nombre de photos qu’il prend sur les zones de façon totalement autonome.
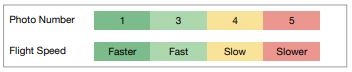
La caméra P1, ne va prendre et ne garder uniquement les photos qui aident à améliorer la reconstitution par photogrammétrie.
C’est intéressant à la fois dans les temps de vol, mais aussi dans les temps de calcul car on ne garde uniquement les photos qui servent réellement à la reconstitution, à améliorer cette précision en altimétrie et les données sur les surfaces verticales.
Le drone se pilote via l’application DJI Pilot que vous connaissez peut-être par d’autres produits de chez DJI. C’est l’interface qui va devenir le standard sur toute la gamme Enterprise.
On note que l’on va pouvoir choisir notre caméra avec l’optique qui est connue dans la mission, ce qui va définir le cadencement photo et la vitesse du drone. Dans le mode Smart oblique, on va pouvoir également définir l’inclinaison de la caméra. Il est possible de gérer différentes méthodes de gestion de l’axe Z, comme la hauteur relative au point de décollage ou l’altitude absolue.
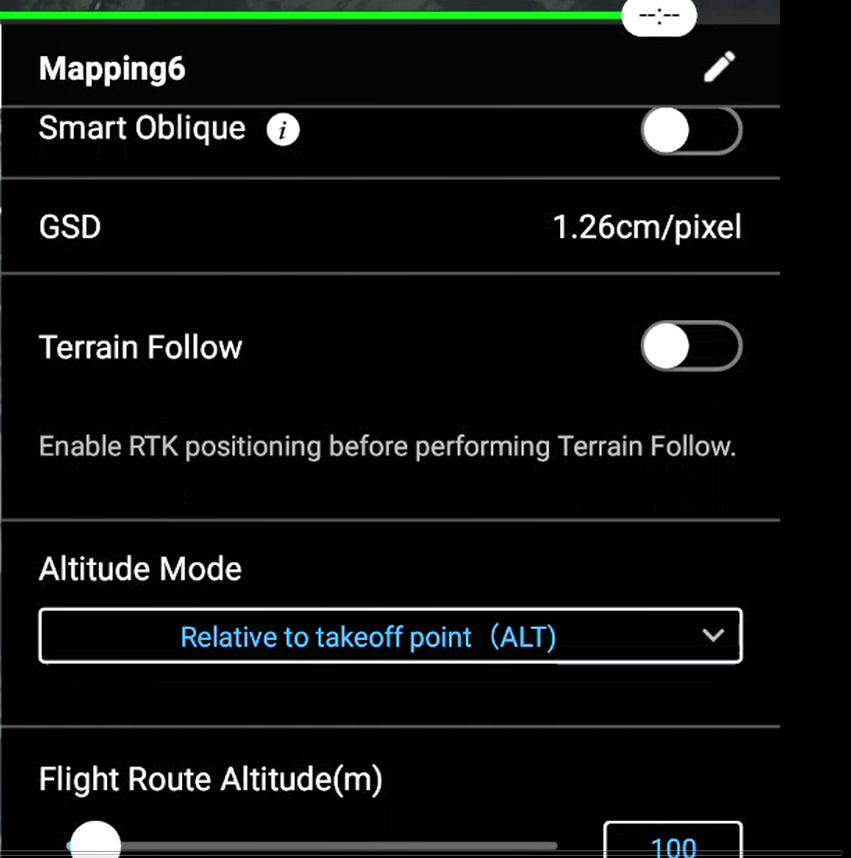
Il est également possible de gérer le suivi de terrain directement dans la création de missions. Sur le Phantom 4 RTK, c’est vraiment un mode de vol presque à part entière. Là, c’est une option qui s’insère dans la création de missions. Si on dispose d’un MNT que l’on veut suivre, il faut valider l’option Terrain Follow et injecter le MNT. Ensuite, on va pouvoir demander de fixer une hauteur de suivi de ce MNT, ce qui permet d’avoir un recouvrement juste, le même sur tout le projet.
La caméra P1 a l’avantage de son capteur plein format, ce qui permet de réaliser des modélisations qui étaient très fastidieuses ou inaccessibles avec un Phantom 4. Nous voyons ici sur le modèle 3D assemblé sur Pix4D, un petit mur de soutènement. La capture est très intéressante car c’est traditionnellement quelque chose de difficile à modéliser.


On note que les angles de ces piles de supports, les angles intérieurs et extérieurs sont très bien définis. On notait souvent que le drapage par photogrammétrie venait lisser les angles. Ici la P1 donne une justesse et une finesse sur cette pile qui est vraiment très représentative de ce qu’est la réalité sur le terrain.
Depuis 2014, Escadrone accompagne ses clients dans l’intégration de la robotique autonome pour des usages civils professionnels.
Pionnière dans la conception, la vente, l’homologation de drones et la formation à ses usages et métiers, elle se positionne comme experte de son domaine et connaît parfaitement tous les acteurs et les produits du marché.
Escadrone vous supporte sur l’ensemble de la chaîne de valeurs depuis la formation à vos outils de collecte d’informations jusqu’au traitement et l’interprétation de vos données.