Optimisez vos levés topographique avec le drone Phantom 4 RTK
Vous avez certainement entendu parler de plan ou modèle réalisé à partir de donnée drone, cet article vous présente comment cela se fait avec le drone Phantom 4 RTK. Dans cet exemple, nous souhaitons modéliser une zone de bureau avec parking, le tout représentant environ 4 hectares.

Nous avons utilisé sur ce projet de modalisation, un drone Phantom 4 RTK et une station GNSS Emlid.


Ces deux outils à destination des topographes propose un fonctionnement avec un GPS L1 L2 L5 embarqué soit en RTK soit en PPK. Le phantom 4 RTK dispose d’un capteur adapté pour la photogrammétrie et un GPS synchronisé avec le capteur photo acceptant des corrections différentielles. La canne Emlid RS 2 permet, elle aussi, un fonctionnement en temps réel pour recevoir les corrections.
Les corrections reçus dans le cadre de ce projet proviennent de Orphéon
Nous avons utilisé un pc de calcul avec un processeur ryzen 5, une mémoire ram de 16Go et une carte graphique GTX1660Ti.
Le logiciel qui a réalisé le calcul est Pix4D.
Nous avions publié un article sur le fonctionnement des GPS centimétrique, comment fonctionne l’amélioration différentielle :
Et aussi un article plus détaillé sur les mode de fonctionnement du drone phantom 4 RTK :
Le temps globale passé sur le terrain incluant toutes les étapes ci dessous décrites est de 1h environ.
Une analyse de la zone de vol a été fait sur dronekeeper (outils d’aide à la préparation de mission drone). Suite à cela un vol a été déclaré sur la plateforme Alphatango en scénario 3. Pour un opérateur drone professionnel, cela ne prend que quelque minutes.
A l’aide de la station GNSS Emlid, en étant connecté en 4G cher le fournisseur de correction Orphéon, nous avons relever une vingtaine de point sur le projet. Certain point serviront a caler le modèle, d’autre uniquement pour vérifier la précision. Environ 30 minutes ont été nécessaire a ce relevé.
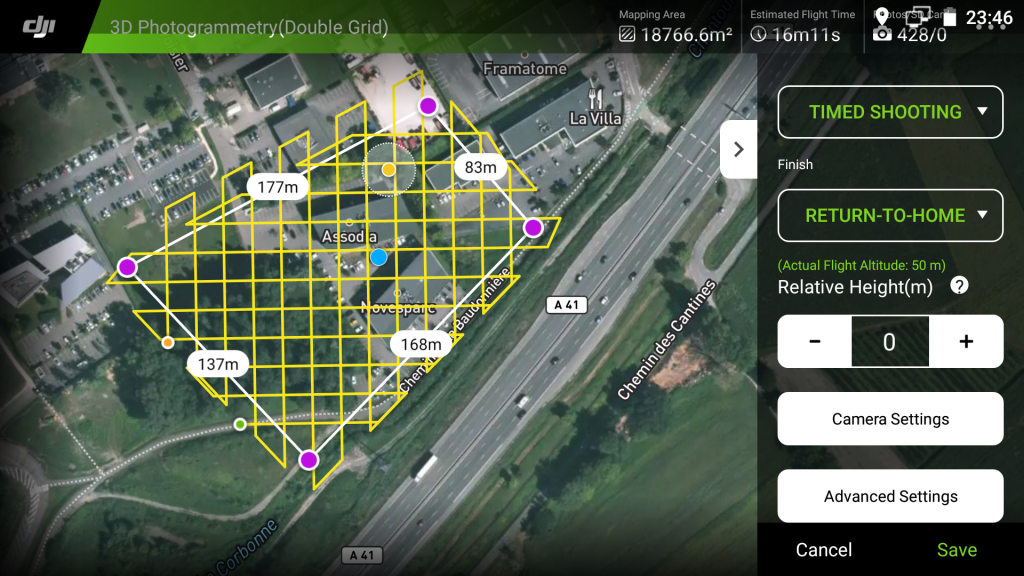

Apres avoir démarré le drone et sa radiocommande avec écran, nous avons programmé le vol sur l’application GSR qui est fournit sur l’écran intégré. Cette étape prend 5 minutes environ en fonction de la mission. En effet l’application GSR est très complète et peut programmer un vol de suivi de ruisseau en corridor avec suivi altimétrique du dénivelé, cela nécessite un peu plus de temps et de préparation bureau.
Mais dans ce projet aucun préparation en amont a été faite et seule 5 minutes sont nécessaire pour paramétrer le vol.
Le vol du drone dure 16 minutes dans ce projet et couvre 4 ha environ. Ce vol est possible tant que les conditions météo le permettent : temps non pluvieux et vent inferieur à 40km/h. Apres le vol, vérifier la qualité (netteté) des cliches pris et la qualité du signal RTK pendant le vol.

Tous le process qui suit est principalement du temps machine, on pourrait décomposer en 30 minute de temps homme et 3h de temps machines.
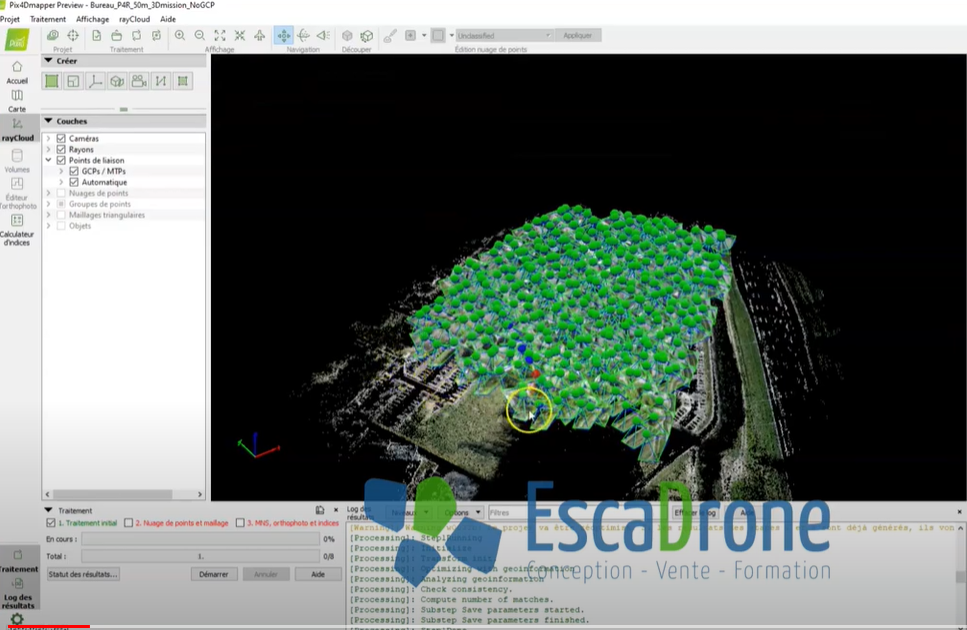

Le principe est de fournir les photos prises au logiciel puis de replacer sur les photos les points relevé au GPS centimétriques. Certain de ces point servent au calage, d’autre à la mesure d’erreur.
Sur ce projet 4 cibles on été utilisé en calage et 10 en contrôle.
L’erreur moyenne quadratique sur les point de contrôle et de l’ordre de 1 à 3 cm en X,Y et Z.
Le dataset utilisé ici est disponible :
https://drive.google.com/drive/folders/1JkiPJG63-WUM0gdclM3E-1skKhZUAcq2
Le model peut être visualiser a cette adresse !
https://cloud.pix4d.com/dataset/650555/model?shareToken=8f8b6a51-14d4-48aa-8ba3-fec96246f743
Une vidéo complète sur tout le traitement sous pix4dmapper est disponible ici : https://youtu.be/lwfOGMt-mVQ









