Lorsqu’il est impossible de fournir un lien de correction en temps réel entre la base Reach RS 2 et le rover en raison d’une portée insuffisante de la ligne de vue LoRa, de l’absence de connexion Internet (comme nous en avions parlé avec le M300 RTK et le LiDAR L1) ou bien de la non-disponibilité du service NTRIP, voici comment disposer de la précision centimétrique de la station GNSS Emlid Reach RS2 quand même, en utilisant la correction PPK.
Retrouvez notre article dédié au fonctionnement du RTK/PPK si vous souhaitez en savoir plus sur ces modes de correction.
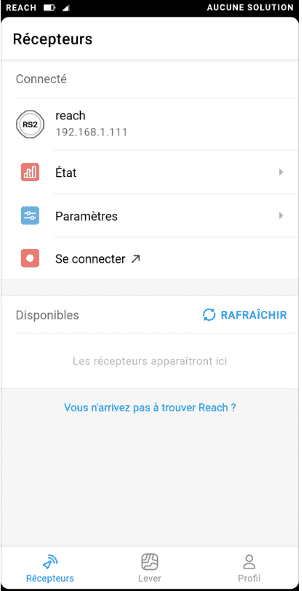
Pour la partie acquisition avec la Reach RS 2, le fonctionnement va être sensiblement le même qu’en RTK, aux différences ci-dessous :
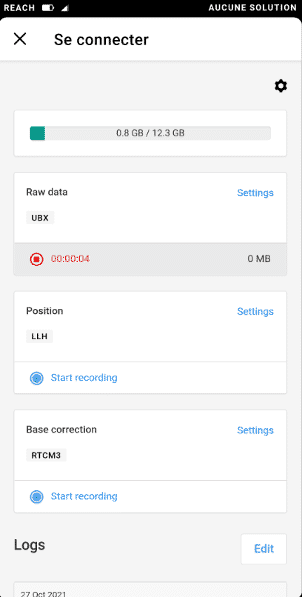
Comme habituellement, à la fin de la mission, exportez vos points mesurés au format CSV. En PPK, il vous faudra aussi exporter le log d’observation que vous avez enregistré.
Pour post traiter nos relevés nous pouvons nous appuyer sur un réseau de stations de référence. En France l’IGN fournit ces données gratuitement via le RGP (Réseau GNSS Permanent d’Institut national de l’information géographique et forestière) avec un délai de quelques jours.
Pour télécharger les observations des stations RGP, allez directement par le site de l’IGN : http://rgp.ign.fr/DONNEES/diffusion/

Une fois le fichier zip téléchargé, ouvrez le avec un logiciel de décompression de fichier comme 7zip (gratuit).
Dans un premier temps, il vous faudra télécharger l’application Emlid Studio : https://docs.emlid.com/emlid-studio/
Pour obtenir vos points en PPK, vous aurez besoin des éléments suivants :
Dans Emlid Studio, choisissez le mode « Stop & Go with RV3 », et ensuite glissez vos différents fichiers :
Rover : le fichier de Log de la Reach RS 2
Base : le fichier d’observation récupéré sur le site de l’IGN
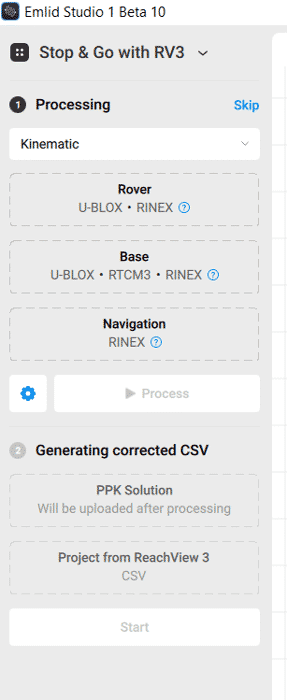
Lancez le traitement en cliquant sur Process. Après le traitement, le fichier .pos résultant sera automatiquement téléchargé dans le dossier PPK.
Glissez ensuite le fichier CSV exporté depuis votre mission, si vous souhaitez obtenir des résultats précis au centimètre près, cochez la case Fixe uniquement.
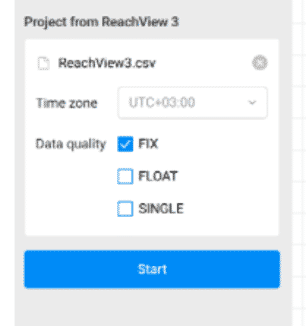
Cliquez sur Start. Le résultat s’affiche sur le graphique.
Enfin, cliquez sur le bouton Show result files pour obtenir le fichier .csv résultant. Emlid Studio crée une copie du fichier .csv nommé « nom_de_votre-fichier_corrigé.csv ».