Tutoriel Escadrone : Terrasolid pour mission lidar par drone (DJI M300RTK + L1)
Bienvenue sur ce nouveau tutoriel Escadrone qui va vous expliquer comment passer d’un nuage capturé avec un LiDAR DJI L1 depuis DJI TERRA (nuage qui n’est pas dans votre système de coordonnées et non optimisé) à un nuage dans votre système et en optimisant le nombre de points ainsi que l’épaisseur du nuage.
Plus clairement, nous allons dans cet exemple diviser par quatre le nombre de points et l’épaisseur du nuage tout en exportant dans un système de coordonnés choisi !
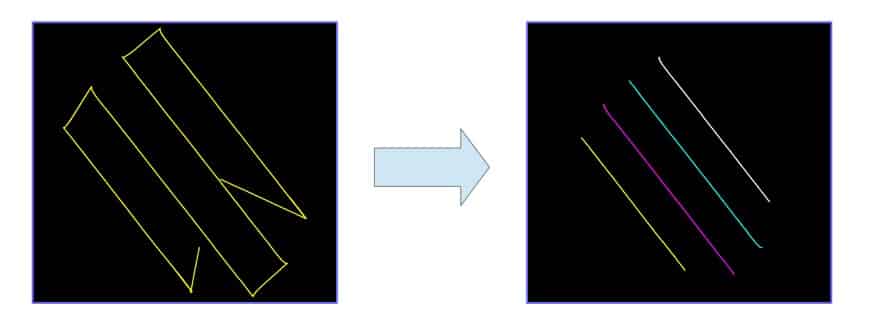
Nous allons donc passer de ça :
À ça :
Pour se faire, nous allons utiliser l’outil Terrasolid UAV pour DJI L1.
Nous allons plus précisément utiliser le bundle avec Spatix qui est gratuit jusqu’au 31/12/2022 pour les possesseurs d’une licence Terra. Elle-même incluse dans l’achat d’un lidar L1 chez Escadrone.
Le bundle Terrasolid UAV comprend donc :

Gestion des trajectoires
Optimisation du nuage de point
Classification
Nettoyage et visualisation
Changement de géoide et de projection
Ajustement et points de contrôles
Vectorisation
Comptage et détection d’arbres

Création des MNT et MNS
Dessin
Visualisation avancée en fonction de paramètres
Calcul de pente
Calcul de volume
Installation de Terrasolid UAV
Le bundle doit être installé sur le même ordinateur que celui qui possède la licence DJI TERRA.
Téléchargez le pack avec spatix ici : https://terrasolid.com/product/terrauav-sx/
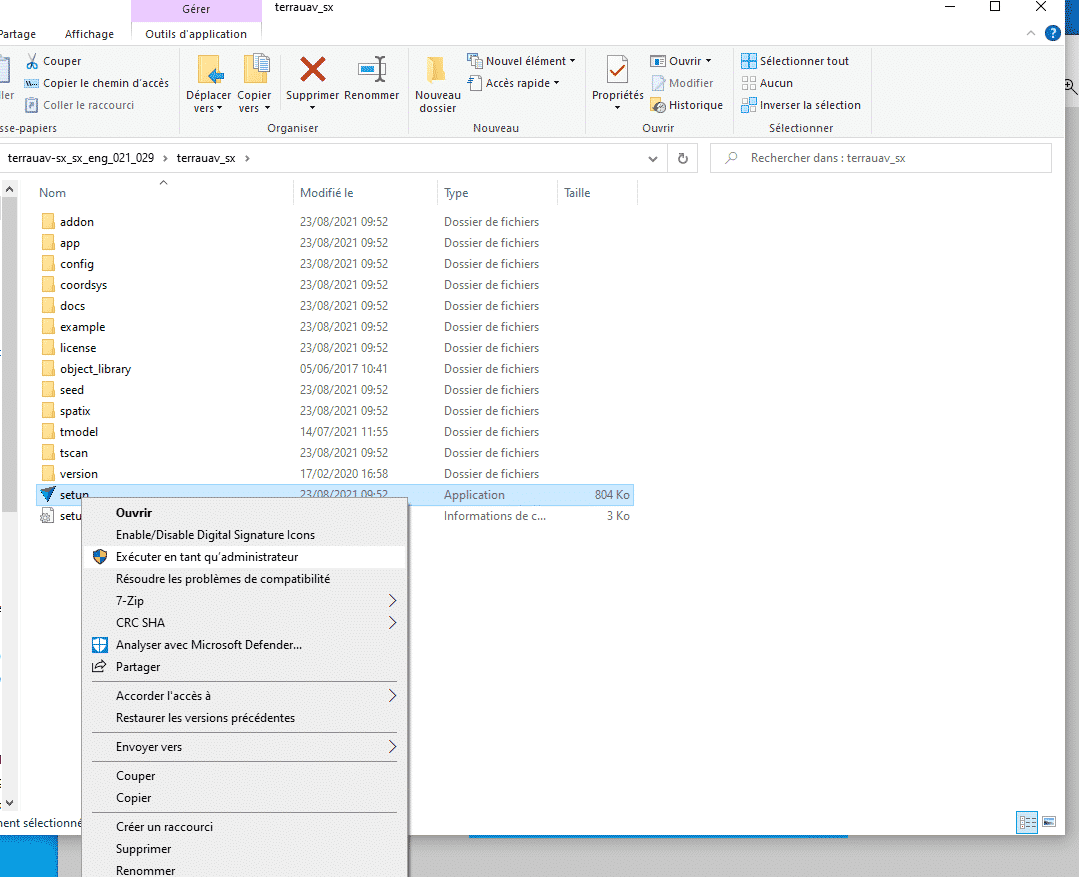
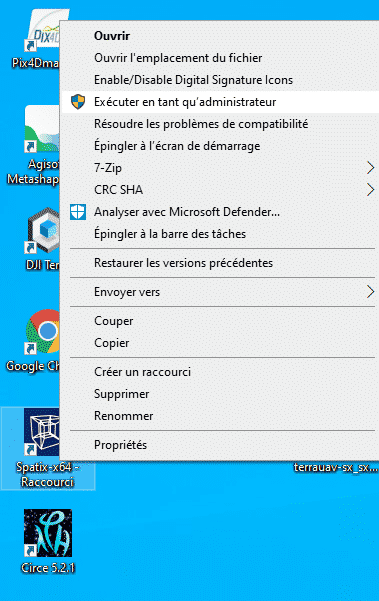
Il faut l’extraire et l’installer en tant qu’administrateur et le lancer en tant qu’administrateur à chaque démarrage.
DJI Terra permet le post process des données brut venant du Lidar DJI L1.
Ce post process a pour but à la fois utiliser la pleine puissance de la centrale inertielle (200HZ de log data), mais aussi de commencer quelques optimisations sur le nuage de points. C’est aussi dans DJI TERRA que nous pourrons faire du PPK sur le GPS du drone. (voir notre guide PPK RTK ici pour plus d’informations sur les modes de fonctionnement d’un GPS)
Le résultat est visible dans DJI Terra ce qui offre une visualisation globale du nuage.
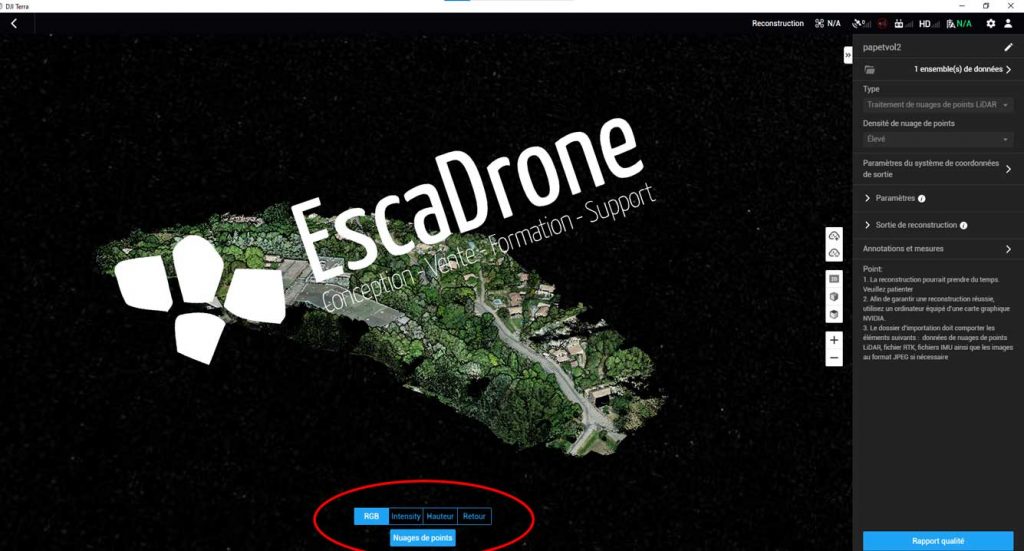
Ici on choisit optimisation de la précision et un export en LAS :
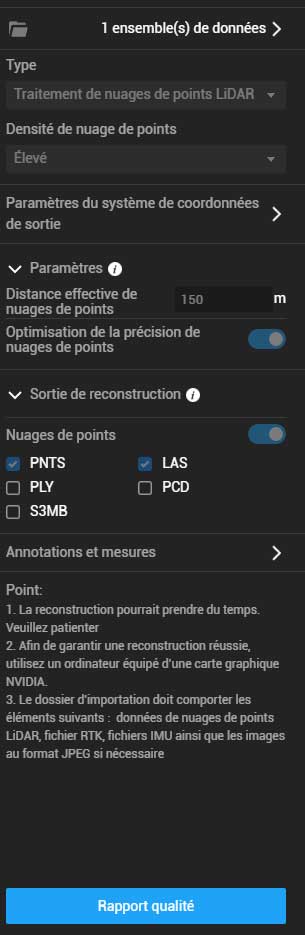
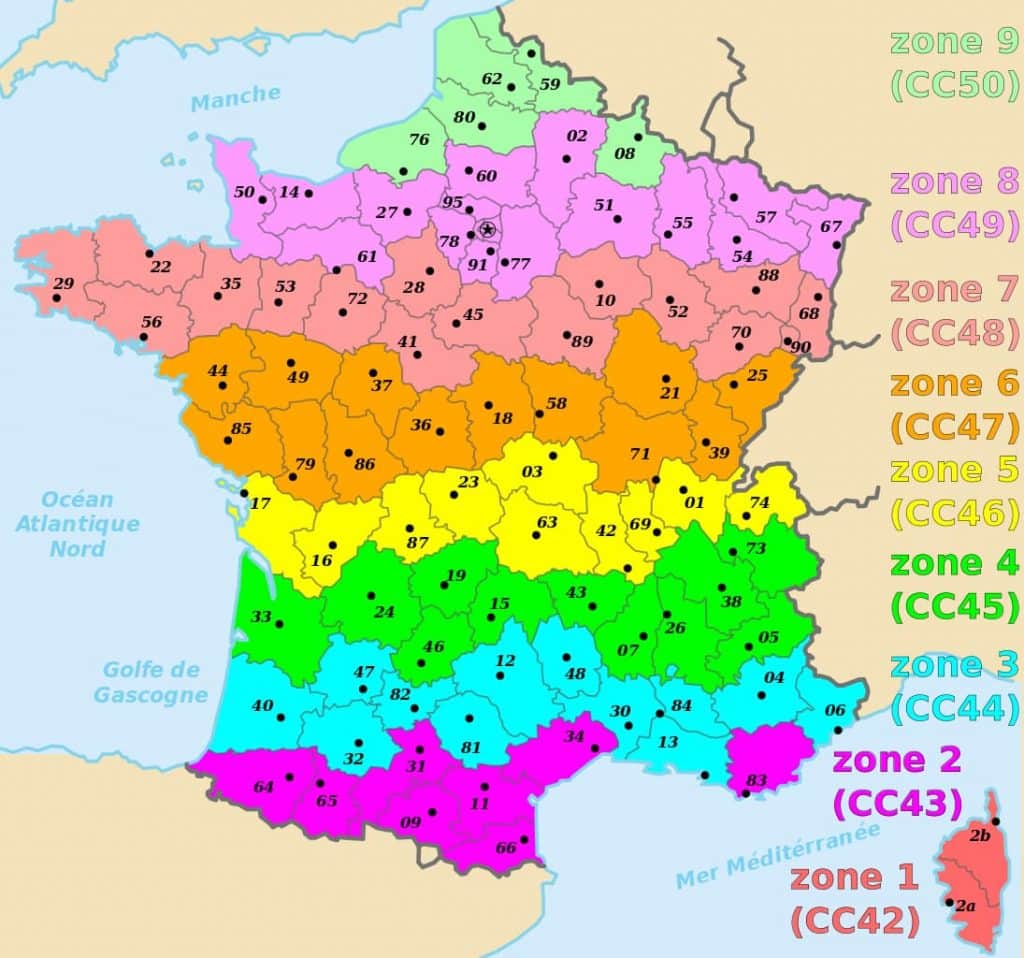
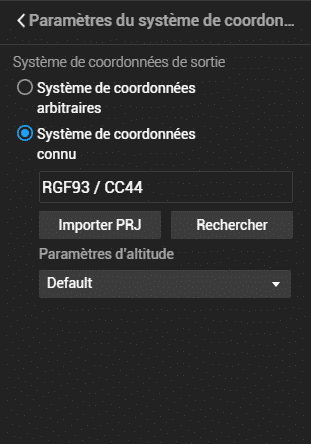
Pour les coordonnées d’export on va choisir notre système de projection local (de nombreux systèmes sont déjà implémentés dans DJI TERRA), dans ce tutoriel RGF93 / CC44.
Puis pour le système altimétrique nous allons laisser par default, ce sera donc une hauteur à l’ellipsoïde GRS80. En effet il reste de nombreux systèmes altimétriques à implémenter par DJI dans TERRA, nous gèrerons cela dans TERRASOLID.
Terrasolid possède peu de systèmes de coordonnées par défaut mais offre la possibilité d’en ajouter par l’utilisateur de façon très simple.
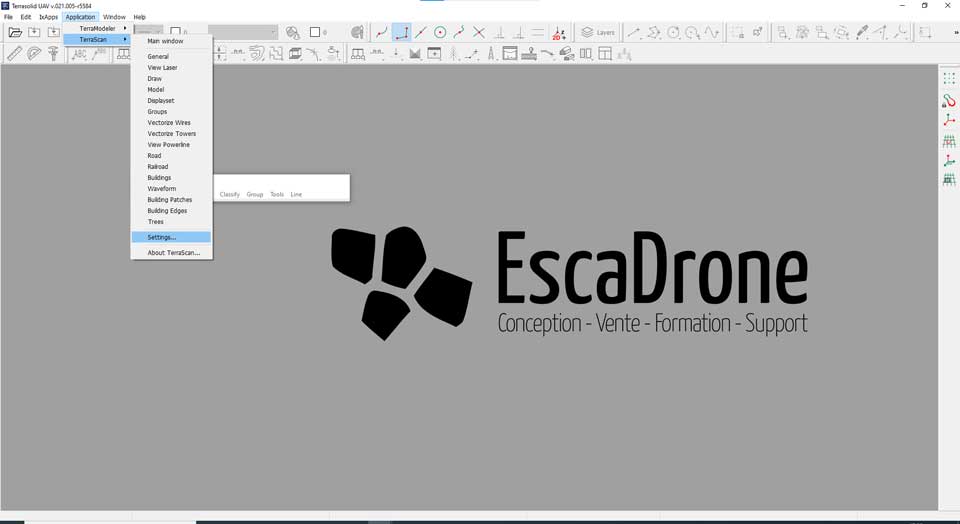
Apres démarrage en admin de Spatix, se rendre dans application, terrascan, settings.
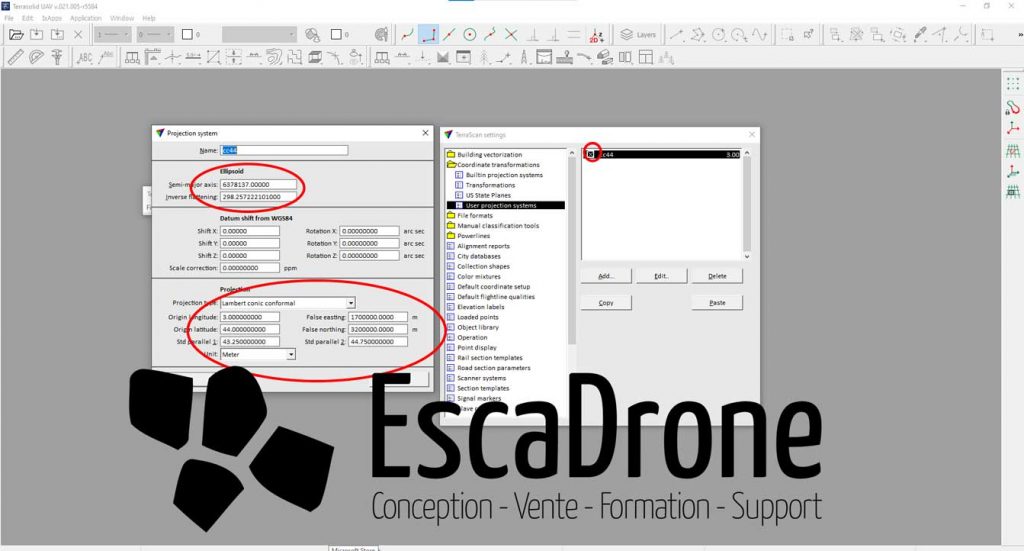
Dans user projection systems, créer un système, bien penser à l’activer en cochant la case avant de quitter.
Pour trouver les valeurs de votre projection, il faut se rendre sur https://spatialreference.org/ref/epsg/3944/html/, et choisir son système. Il est à noter que central meridian et origin longitude représente la même chose.

Nous allons maintenant créer un fichier de conversion d’altitude entre la hauteur à l’ellipsoïde (la ref Z de notre nuage de point) et l’altitude IGN69 à l’aide de la grille RAF18b.
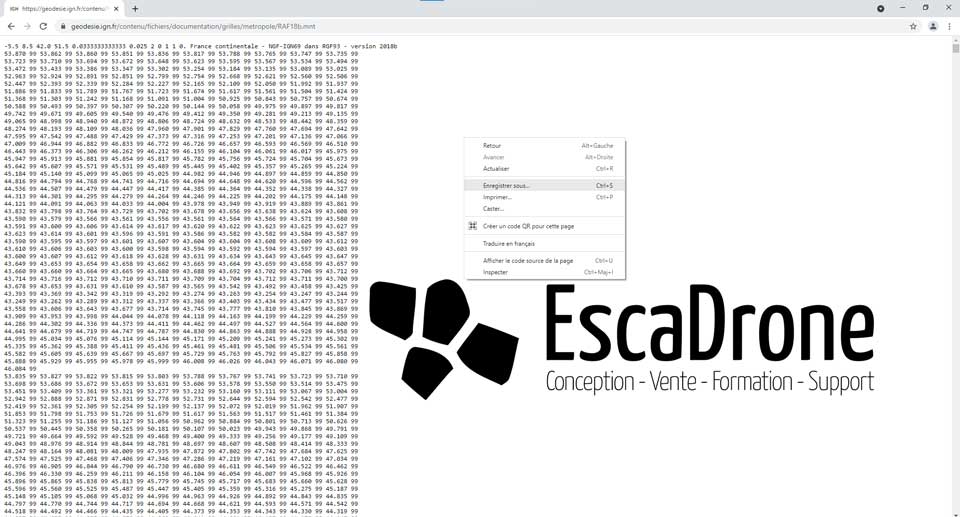
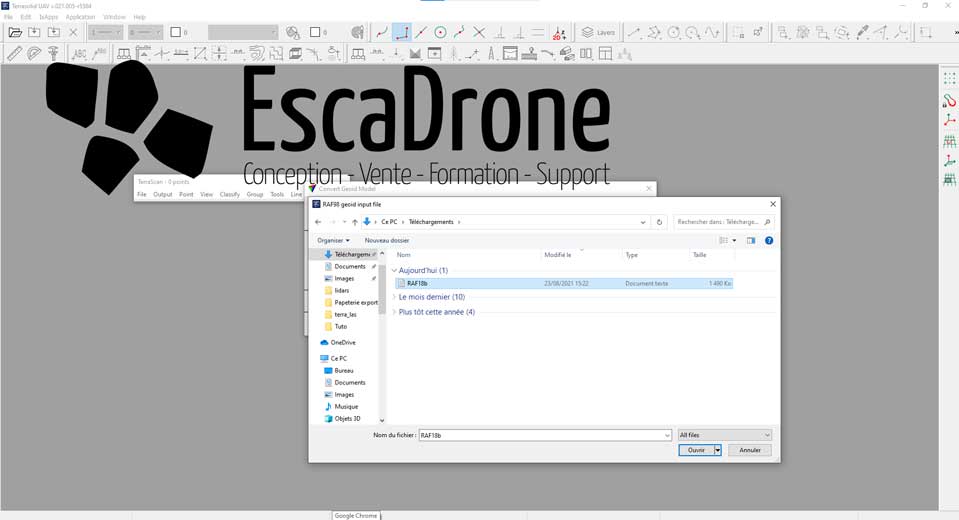
Dans notre cas il faut se rendre sur le site de l’IGN : https://geodesie.ign.fr/contenu/fichiers/documentation/grilles/metropole/RAF18b.mnt
Clic droit et enregistrer sous :
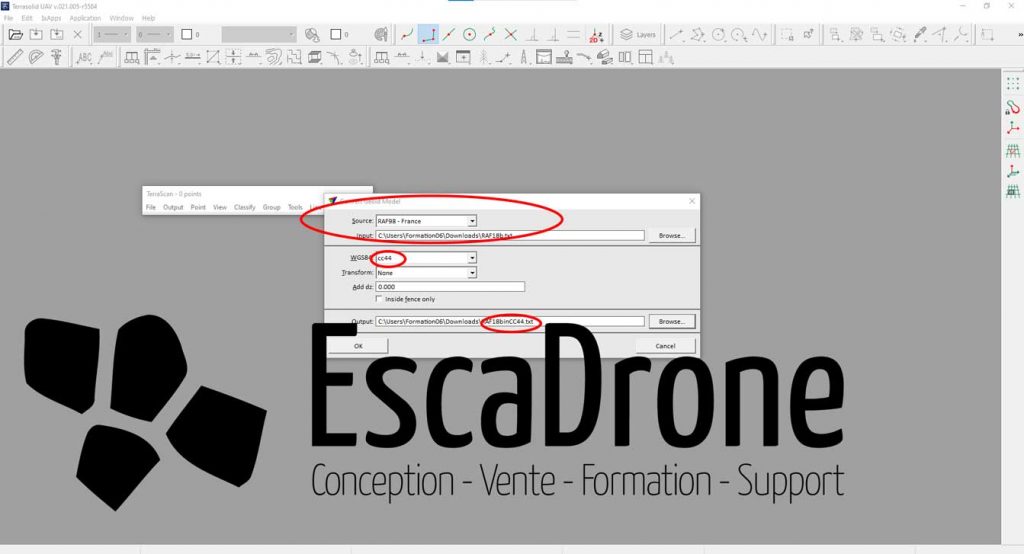
Dans source sélectionner RAF98 – France (cela permet au logiciel de comprendre comment lire la grille que nous allons charger)
Bien sectionner RAF98 pour la grille RAF18b. (Pour ceux qui souhaitent comprendre comment fonctionne la grille : https://geodesie.ign.fr/contenu/fichiers/documentation/grilles/notices/Grilles-MNT-TXT_Formats.pdf)
Puis dans Input sélectionner le fichier téléchargé depuis le site de l’IGN
Dans WGS84 choisir la projection de votre nuage de point (celle créée plus haut)
Puis choisir un dossier de sortie pour la création du fichier de conversion.
Nous avons donc créé un fichier de conversion qui contient :
A tel X et tel Y en CC44 soustraire tel valeur au Z.
Nous avons donc créé un fichier de conversion qui contient : A tel X et tel Y en CC44 soustraire tel valeur au Z.
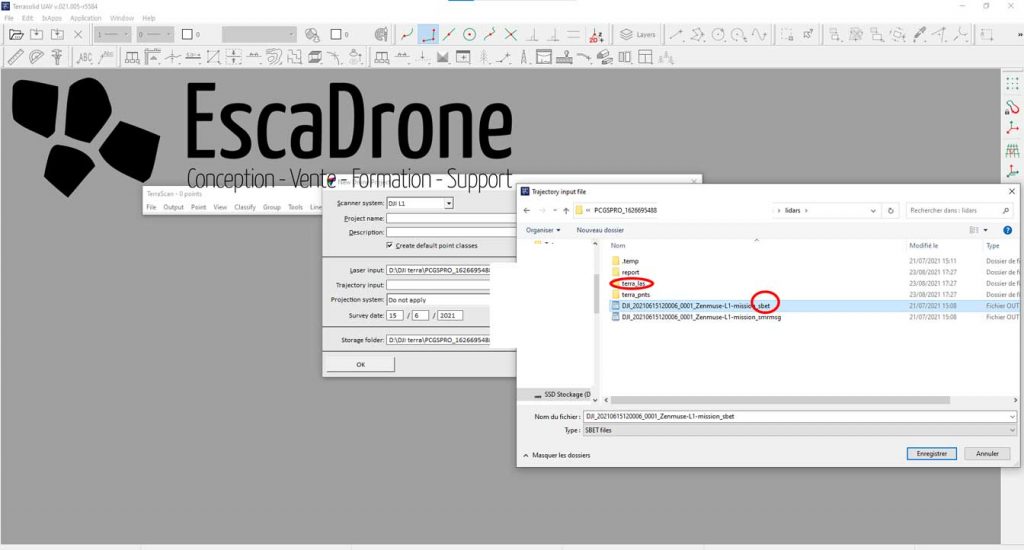
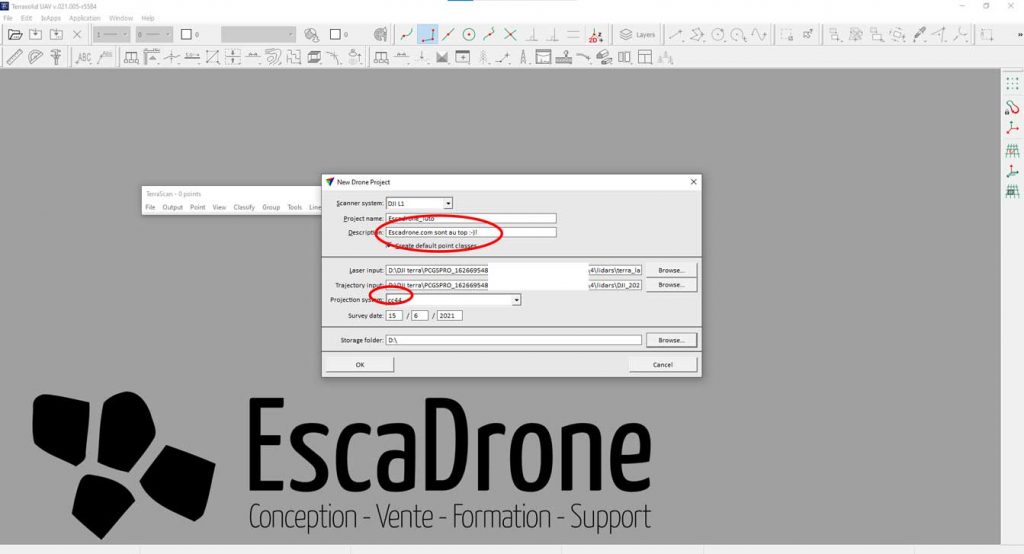
Dans le menu Terrascan : File/Drone project/new
Dans le menu Terrascan : File/Drone project/process data
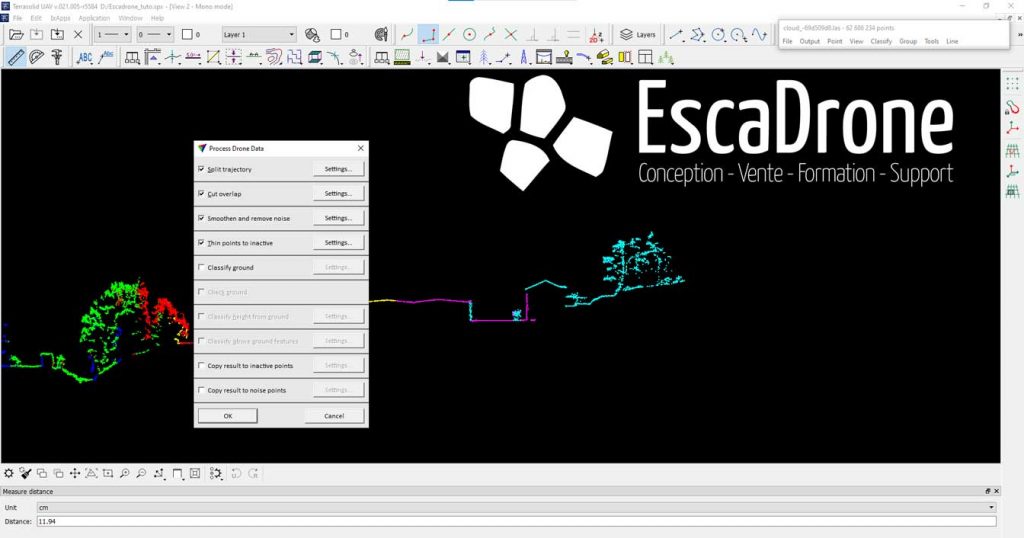
Le but est d’ordonner et nettoyer la trajectoire du Lidar.
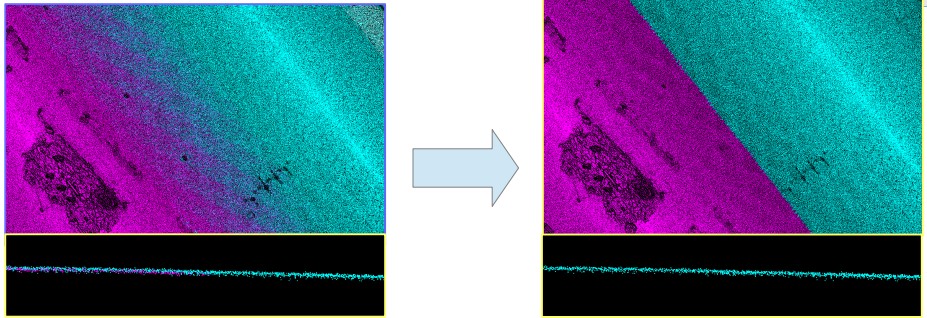
Cette fonction supprime les points au niveau des zones de recouvrement ainsi une seule passe sera sur chaque point xy. Cela améliore la précision en enlevant les points les plus mauvais mais aussi réduit la taille du nuage de point.
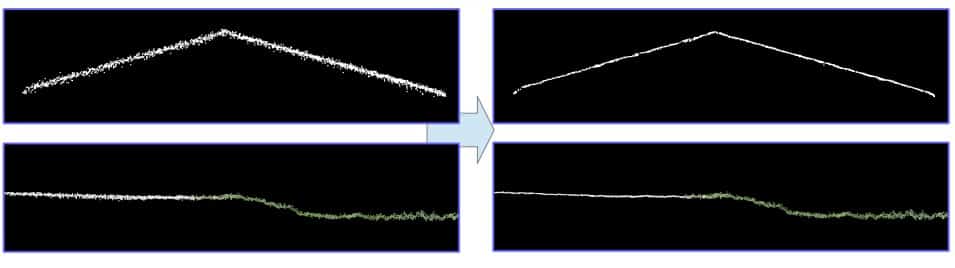
Cette fonction lisse le nuage en enlevant le bruit, les points les plus éloignés de la surface médiane. Cette fonction utilise la reconnaissance de couleur afin de ne pas s’appliquer à la végétation.
Cette fonction aminci et place les points dans inactive.
Dans cette étape, nous allons utiliser le fichier de conversion créer un plus haut dans ce tuto pour passer du système altimétrique ellipsoïdale au système IGN69.
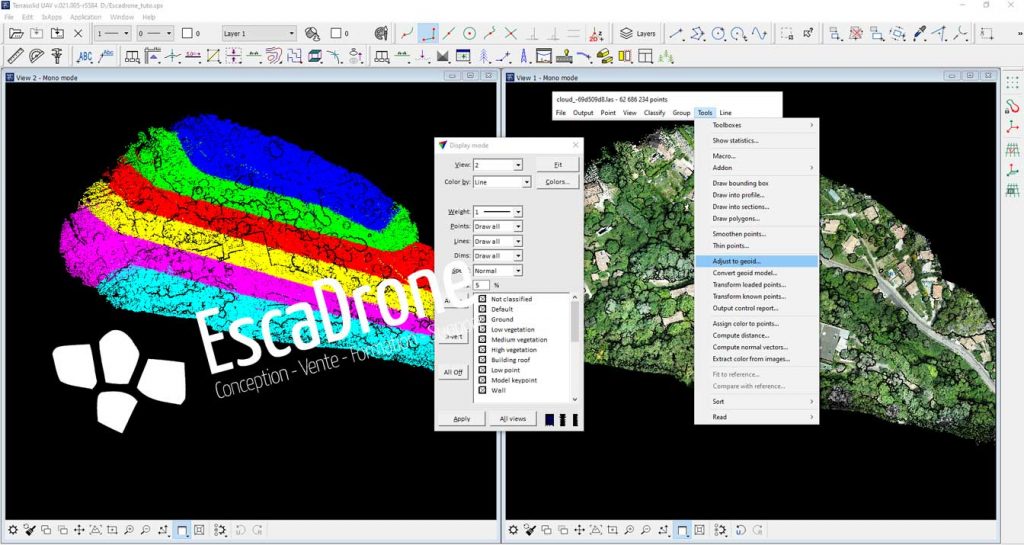
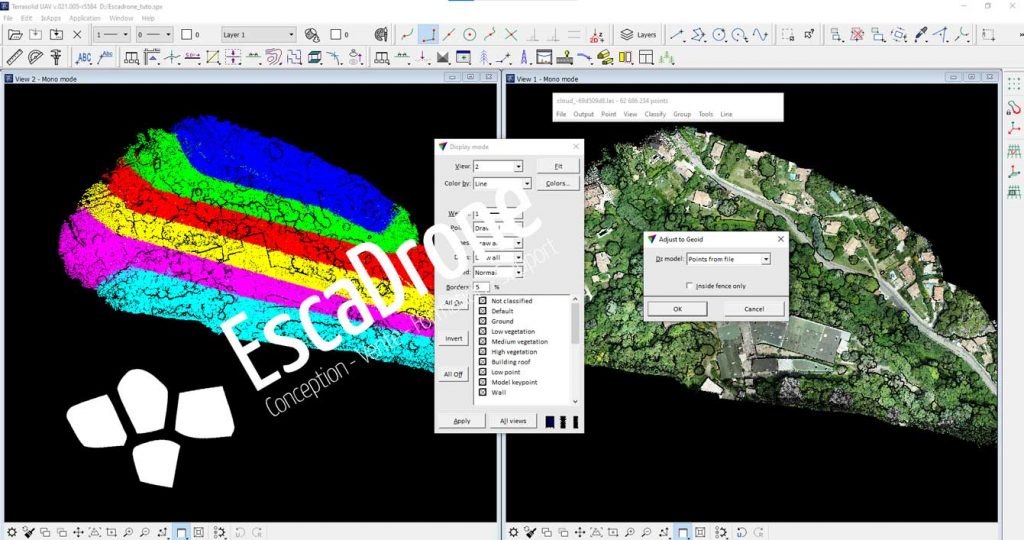
Sélectionner Adjust to geoid dans Tools.
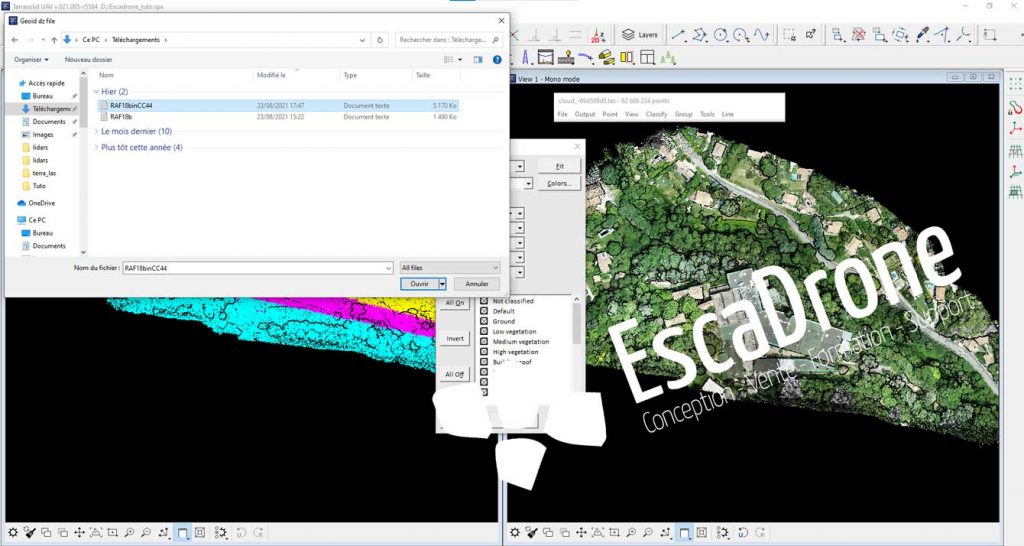
Choisir le fichier précédemment crée.
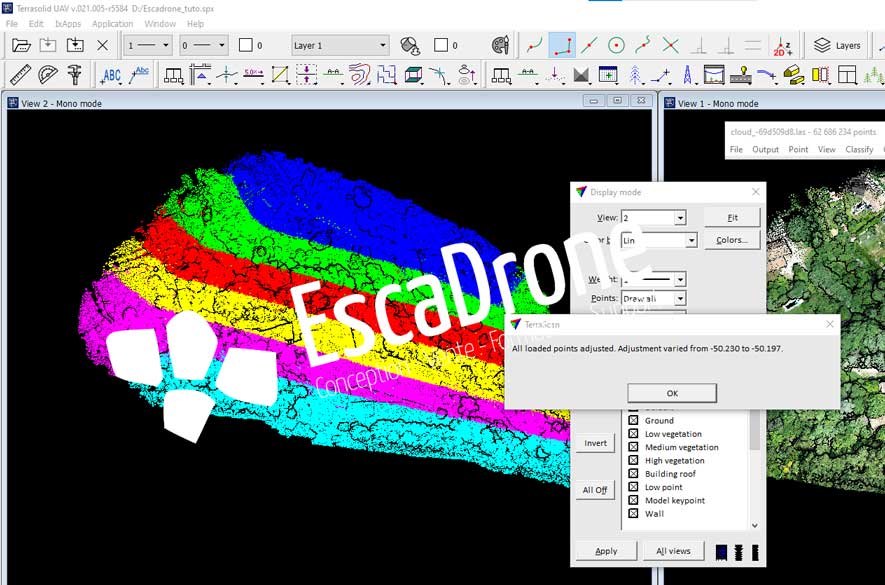
La correction dans notre cas appliquée au nuage de points en Z varie de -50.230m à -50.197m.
Au vu de la position du projet cela est conforme et peut être vérifier avec un outil du circé v5.
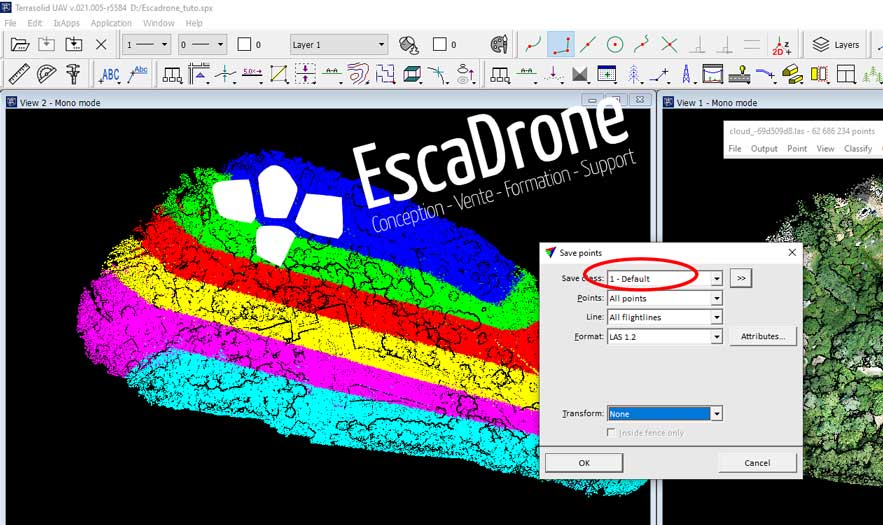
Choisir save point as dans File
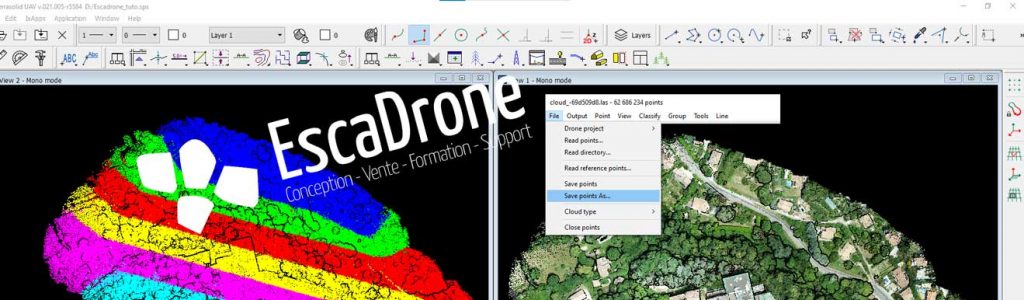
Et choisir la classe par default.
Dans un autre tutoriel, nous traiterons des cibles de calage.
Au plaisir !








